一、前言
在汽车电子、工业自动化等众多领域,CAN 总线作为一种可靠的通信协议被广泛应用。而 AS32S601 芯片凭借其卓越的性能和可靠性,在这些领域也发挥着重要作用。其中,CAN Bus Off 功能作为 CAN 总线通信中的关键错误处理机制,对于保障整个通信网络的稳定性具有重要意义。
二、CAN Bus Off 功能详解
(一)定义与作用
CAN Bus Off(总线关闭)是指 CAN 节点因发送错误帧过多,超出设定数量后,被总线 “关闭” 进入 Bus Off 状态。此时节点无法收发消息,直至被重置或自动恢复。其主要作用是防止故障节点持续干扰总线通信,确保其他正常节点能继续工作。
(二)错误状态分类
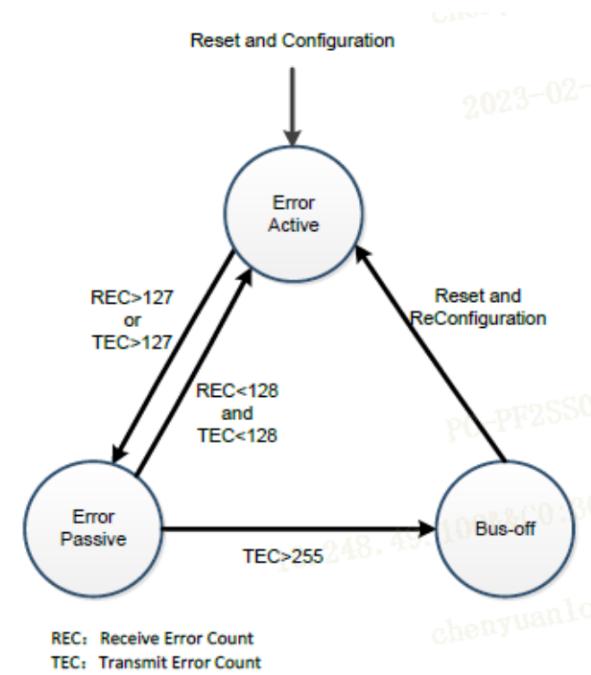
主动错误状态(Error Active) :节点正常参与通信时的状态。检测到错误会发送主动错误标志(连续 6 个显性位),强制中断当前总线报文传输。
被动错误状态(Error Passive) :节点发送或接收错误计数器超过 127 时进入。此状态下节点虽能通信,但发送错误标志时用被动错误标志(连续 6 个隐性位),不会强制中断总线报文传输。
总线关闭状态(Bus Off) :最严重错误状态,节点发送错误计数器(TEC)超过 255 时触发。节点完全脱离总线,不能收发报文。
Bus Off机制的设计目的是为了避免某个设备因为自身原因(例如硬件损坏)导致无法正确收发报文而不断破坏总线的数据帧,从而影响其他正常节点通信。
三、Bus Off 产生原因与触发条件
(一)产生原因
物理层故障 :如 CAN_H/CAN_L 线路开路或短路(包括对电源或地短路)、终端电阻缺失、接地不良等,会影响信号传输的完整性和可靠性,进而导致 CAN 节点出现错误帧。
信号干扰 :强电磁干扰、强电流干扰会破坏 CAN 总线上传输的信号,使节点接收到错误的报文,从而引发错误计数器增加。
节点故障 :CAN 控制器或收发器硬件损坏、软件逻辑错误导致持续发送错误帧,会使节点自身发送错误帧数量迅速上升,最终触发 Bus Off 状态。
总线负载过高 :CAN 总线负载率长期接近或超过理论上限(如 >70%),会导致报文无法及时发送,节点重试次数增加,错误计数累积。
(二)触发机制
基于 CAN 协议定义的错误计数器机制,主要包括发送错误计数器(TEC)和接收错误计数器(REC)。当 TEC 超过阈值(通常为 255)时,节点进入 Bus Off 状态。错误计数规则如下:
发送错误时:TEC + 8
接收错误时:REC + 1
成功发送后:TEC - 1(最低降至 0)
成功接收后:REC - 1(最低降至 0)
状态转换路径依次为主动错误状态 → 被动错误状态 → 总线关闭状态。
四、Bus Off 的检测与解决测试
(一)检测方法
错误计数器监控 :通过监控 TEC 和 REC 值预测节点状态变化。当 TEC > 127 时进入被动错误状态;TEC > 255 时进入 Bus Off 状态。可使用如下代码监控并打印 TEC 计数:
1 2 3 | /*------监控并打印TEC计数------*/ Printf("TEC: 0x%x !\r\n", CANFD3->ECR & CANFD_ECR_TEC); Printf("ESTAT: 0x%x\r\n", CANFD3->SR & CANFD_SR_ESTAT); |
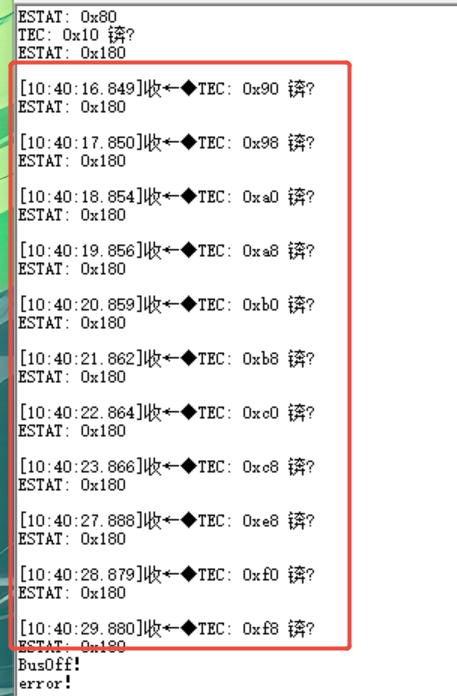
2.状态寄存器查询 :在错误中断处理逻辑中查询 CAN 控制器的状态寄存器相应位。示例代码如下:
01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 | PLIC_InitTypeDef PLIC_InitStructure; CANFD_ITConfig(CANFD3, CANFD_IT_EBSOFF, ENABLE);//打开BUSOFF中断 /* * Function: CANFD3_IRQ_Handler * Description: CANFD3 interrupt handler function. * Param: None. * Return: None. */ void CANFD3_IRQ_Handler() { if(CANFD_GetITStatus(CANFD3, CANFD_FLAG_BSOFF) != RESET) { Printf("BusOff!\r\n"); /* Clear the interrupt pending bits */ CANFD_ClearITPendingBit(CANFD3, CANFD_CLEAR_BSOFF); } } |
(二)解决方案
自动恢复 :若支持自动恢复功能(auto bus on),可使用以下代码开启:
1 2 | /*------打开BUS-OFF自动回复功能------*/ CANFD_AutoBusOffRecoConfig(CANFD3,ENABLE); |

2.手动恢复 :需重置 CAN 控制器或重新初始化 CAN 节点。让 CAN 进入初始化模式,再进入正常工作模式。示例代码如下:
1 2 3 4 5 6 7 | /*------打开BUS-OFF自动回复功能------*/ if(key3_flag) { key3_flag = 0; CANFD_SetBusOff_Recovery(CANFD3); Printf("The key3 pressed,BUS-OFF Recovery!\r\n"); } |
3.快慢恢复策略
快恢复适用于临时性错误,短时间内(如 50ms)尝试恢复;慢恢复适用于较长时间(如 1s)后恢复,避免频繁错误影响系统。代码示例如下:
01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 | /*------BUS-OFF慢恢复-快恢复策略------*/ if(Quick_Recovery_Flag <5) { if(time50_flag) { time50_flag = 0; Quick_Recovery_Flag++; CANFD_SetBusOff_Recovery(CANFD3); Printf("50ms BUS 0FF Quick Recovery!\r\n"); } } if(Slow_Recovery_Flag <3) { if(time1000_flag) { time1000_flag= 0; Slow_Recovery_Flag++; CANFD_SetBusOff_Recovery(CANFD3); Printf("1000ms BUS 0FF Slow Recovery!\r\n"); } } |
五、Bus Off 的影响与后果
(一)对节点的影响
通信能力丧失 :节点无法发送报文或应答总线上的报文,也不能对总线产生任何影响,但部分实现下仍可接收总线上的数据。
功能限制 :虽然 ECU 节点从总线脱离,但 ECU 依然正常运行,所有任务仍被操作系统调度。
(二)对系统的影响
保护机制 :防止故障节点不断发送错误帧,影响整个网络的通信质量,确保其他正常节点可以继续通信。
潜在风险 :若关键节点进入 Bus Off 且无法恢复,可能导致系统功能降级或失效,在安全关键系统中可能引发更严重的后果。
总结
CAN Bus Off 功能作为 CAN 总线通信中的重要错误处理机制,在 AS32S601 芯片中得到了良好的支持和实现。通过深入了解其原理、产生原因、触发条件以及检测和恢复方法,我们能够更好地应对 CAN 总线通信中可能出现的问题,提高系统的可靠性。在实际应用中,应根据系统需求选择合适的检测和恢复策略,平衡系统可靠性和响应速度。
)






)






![[4.2-2] NCCL新版本的register如何实现的?](http://pic.xiahunao.cn/[4.2-2] NCCL新版本的register如何实现的?)




读书笔记 23)