文章目录
- 程序介绍
- 系统建模
- 滤波框架
- 仿真设置
- 性能对比
- 代码优点
- 运行结果
- MATLAB源代码
程序介绍
本程序实现了 三维状态量的扩展卡尔曼滤波(EKF)组合导航仿真,采用严格的15维误差状态模型,状态向量包括:
x=[pxpypzvxvyvzϕθψbgxbgybgzbaxbaybaz]Tx = \begin{bmatrix} p_x & p_y & p_z & v_x & v_y & v_z & \phi & \theta & \psi & b_g^x & b_g^y & b_g^z & b_a^x & b_a^y & b_a^z \end{bmatrix}^T x=[pxpypzvxvyvzϕθψbgxbgybgzbaxbaybaz]T
其中,位置 ppp、速度 vvv、姿态欧拉角 (ϕ,θ,ψ)(\phi, \theta, \psi)(ϕ,θ,ψ)、陀螺偏差 bgb_gbg、加速度计偏差 bab_aba 构成完整的15维误差状态。
系统建模
- 过程模型 由IMU观测驱动,采用离散状态转移函数:
pk+1=pk+vkΔtvk+1=vk+(Cbn(fm−ba)−g)ΔtΘk+1=Θk+(ωm−bg)Δtbg,ba视为随机游走模型\begin{aligned} p_{k+1} &= p_k + v_k \Delta t \\ v_{k+1} &= v_k + \big(C_{bn}(f_m - b_a) - g\big)\Delta t \\ \Theta_{k+1} &= \Theta_k + (\omega_m - b_g)\Delta t \\ b_g, b_a & \ \text{视为随机游走模型} \end{aligned} pk+1vk+1Θk+1bg,ba=pk+vkΔt=vk+(Cbn(fm−ba)−g)Δt=Θk+(ωm−bg)Δt 视为随机游走模型
其中,fm,ωmf_m, \omega_mfm,ωm 分别为测得的加速度与角速度,CbnC_{bn}Cbn 为姿态方向余弦矩阵。
- 观测模型 来自GNSS,观测量为位置和速度
滤波框架
扩展卡尔曼滤波按以下步骤实现:
- 预测:
x^k∣k−1=f(x^k−1,uk−1)\hat{x}_{k|k-1} = f(\hat{x}_{k-1}, u_{k-1}) x^k∣k−1=f(x^k−1,uk−1)
Pk∣k−1=FPk−1FT+QP_{k|k-1} = F P_{k-1} F^T + Q Pk∣k−1=FPk−1FT+Q
- 更新:
若有GNSS观测:
Kk=Pk∣k−1HT(HPk∣k−1HT+R)−1K_k = P_{k|k-1} H^T (H P_{k|k-1} H^T + R)^{-1} Kk=Pk∣k−1HT(HPk∣k−1HT+R)−1
x^k=x^k∣k−1+Kk(zk−h(x^k∣k−1))\hat{x}_{k} = \hat{x}_{k|k-1} + K_k(z_k - h(\hat{x}_{k|k-1})) x^k=x^k∣k−1+Kk(zk−h(x^k∣k−1))
Pk=(I−KkH)Pk∣k−1P_k = (I - K_k H) P_{k|k-1} Pk=(I−KkH)Pk∣k−1
其中,FFF 和 HHH 分别为系统雅可比矩阵和观测雅可比矩阵。
仿真设置
- 真实轨迹为 螺旋上升运动,即圆周运动叠加线性爬升。
- IMU数据由真实运动加噪声和随机偏差生成。
- GNSS每秒输出一次位置与速度观测。
性能对比
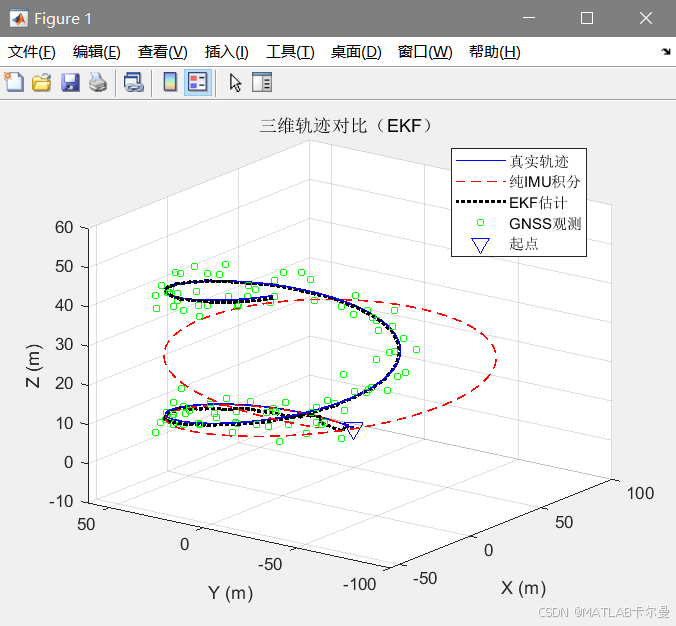
程序对比了三种轨迹:
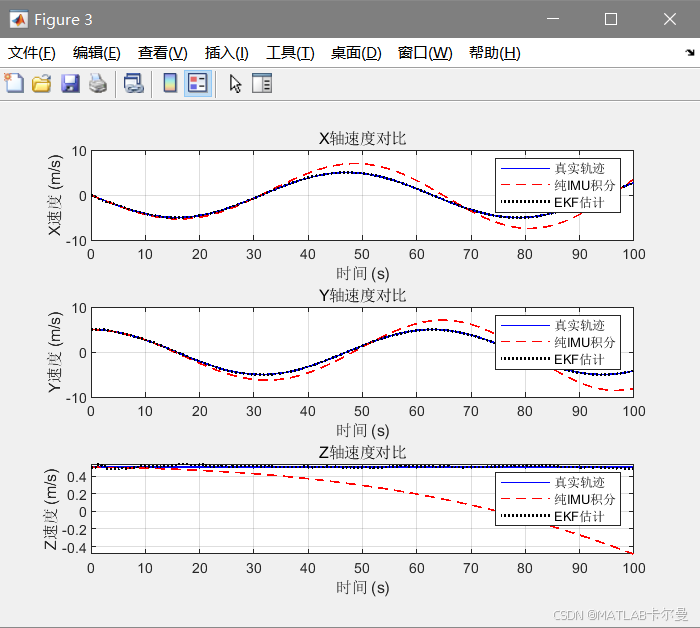
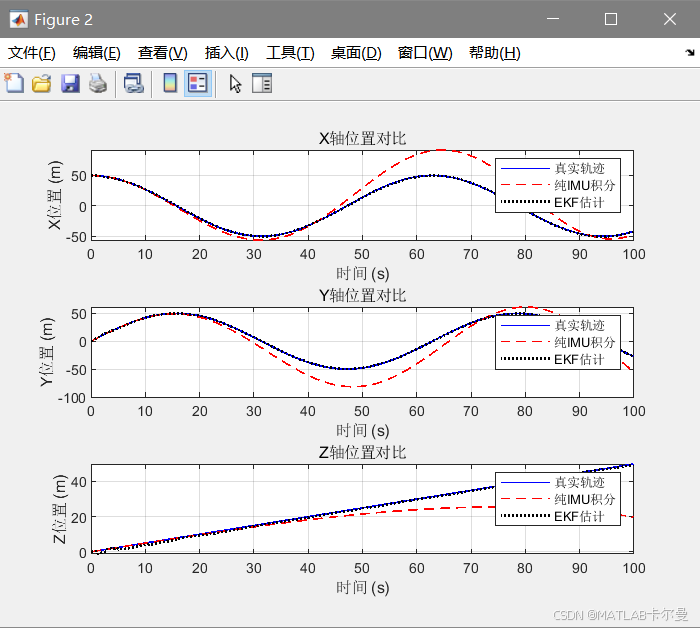
- 真实轨迹(蓝线)
- 纯IMU积分结果(红线)
- EKF融合结果(黑线)
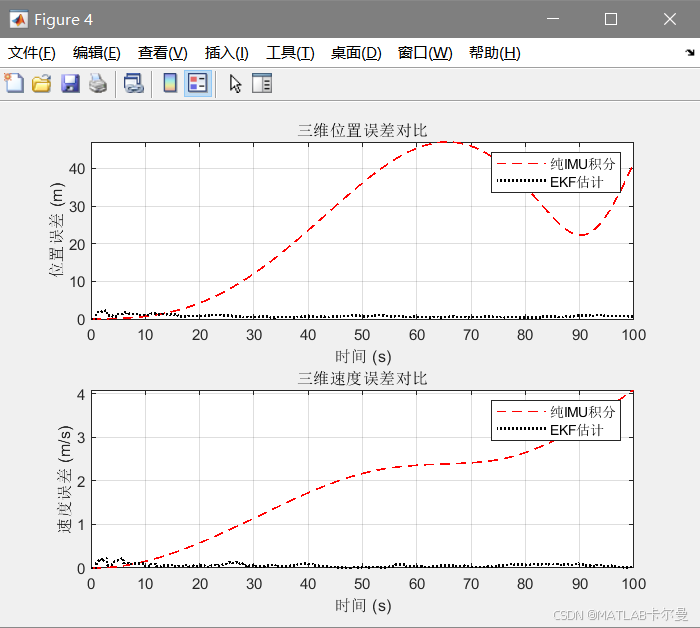
并绘制位置、速度、姿态曲线及误差随时间的变化,计算均方根误差 (RMSE) 作为性能指标。
代码优点
- 使用严格的 15维误差状态建模,保证了惯导/GNSS组合导航的一致性推导。
- 包含 状态转移雅可比矩阵 和 观测雅可比矩阵 的显式计算,便于理论分析与扩展。
- 程序结果直观展示了 EKF在三维导航中的精度改进:有效抑制纯IMU积分的发散,显著降低位置与速度误差。
运行结果
三维轨迹对比:
各轴速度、位置、姿态对比:
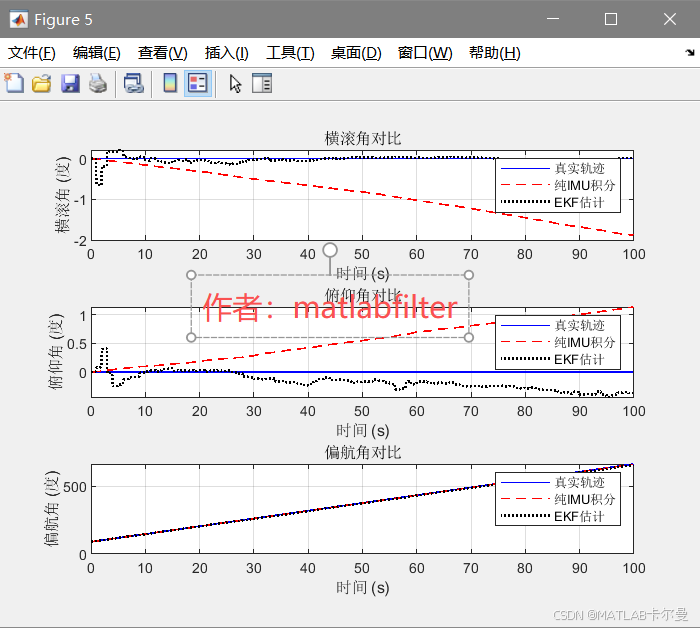
误差对比:
MATLAB源代码
部分代码:
% 三维状态量的EKF例程(严格的组合导航推导)
% 基于15维误差状态模型:位置(3)、速度(3)、姿态(3)、陀螺偏差(3)、加速度计偏差(3)
% 作者:matlabfilter
% 2025-08-25/Ver1 clear; clc; close all;
rng(0); % 固定随机种子%% 系统参数设置
dt = 0.1; % 采样时间间隔 (s)
total_time = 100; % 总仿真时间 (s)
N = total_time / dt; % 采样点数%% 噪声参数设置
% IMU噪声参数
gyro_noise_std = 0.01 * pi/180; % 陀螺噪声标准差 (rad/s)
accel_noise_std = 0.001; % 加速度计噪声标准差 (m/s^2)
gyro_bias_std = 0.001 * pi/180; % 陀螺偏差标准差 (rad/s)
accel_bias_std = 0.0001; % 加速度计偏差标准差 (m/s^2)% GNSS观测噪声
gnss_pos_noise_std = 3; % GNSS位置噪声标准差 (m)
gnss_vel_noise_std = 0.1; % GNSS速度噪声标准差 (m/s)%% 过程噪声协方差矩阵Q (15×15)
% 状态顺序:[位置(3), 速度(3), 姿态(3), 陀螺偏差(3), 加速度计偏差(3)]
Q = zeros(15, 15);
% 位置噪声(通过速度积分产生)
Q(1:3, 1:3) = eye(3) * (accel_noise_std * dt^2 / 2)^2;
% 速度噪声
Q(4:6, 4:6) = eye(3) * (accel_noise_std * dt)^2;
% 姿态噪声
Q(7:9, 7:9) = eye(3) * (gyro_noise_std * dt)^2;
% 陀螺偏差噪声
Q(10:12, 10:12) = eye(3) * (gyro_bias_std * dt)^2;
% 加速度计偏差噪声
Q(13:15, 13:15) = eye(3) * (accel_bias_std * dt)^2;完整代码:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者




创建智能体的完整步骤)



)


)




)


