近年来,大语言模型(LLMs)和强化学习(RL)的融合正在彻底改变我们构建和部署AI系统的方式。早期的LLM强化学习(LLM-RL)主要关注如何通过人类反馈(如RLHF)让模型生成更符合人类偏好的单轮响应。虽然这类方法在指令遵循和价值观对齐方面取得了成功,但它们却忽略了一个更本质的问题:真正的智能往往体现在序列决策中——面对复杂、动态、部分可见的环境,能够持续规划、使用工具、记忆历史、自我反思并执行多步行动。

论文:The Landscape of Agentic Reinforcement Learning for LLMs: A Survey
链接:https://arxiv.org/pdf/2509.02547
这篇综述正是对这一新兴范式——Agentic Reinforcement Learning(Agentic RL,智能体强化学习)——的系统性总结与展望。Agentic RL不再将LLM视为一个被动的文本生成器,而是将其塑造为一个具有自主决策能力的智能体,能够在与环境的多轮交互中学习并成长。
论文的核心贡献包括:
正式定义了Agentic RL,并通过MDP/POMDP框架将其与传统LLM-RL区分开;
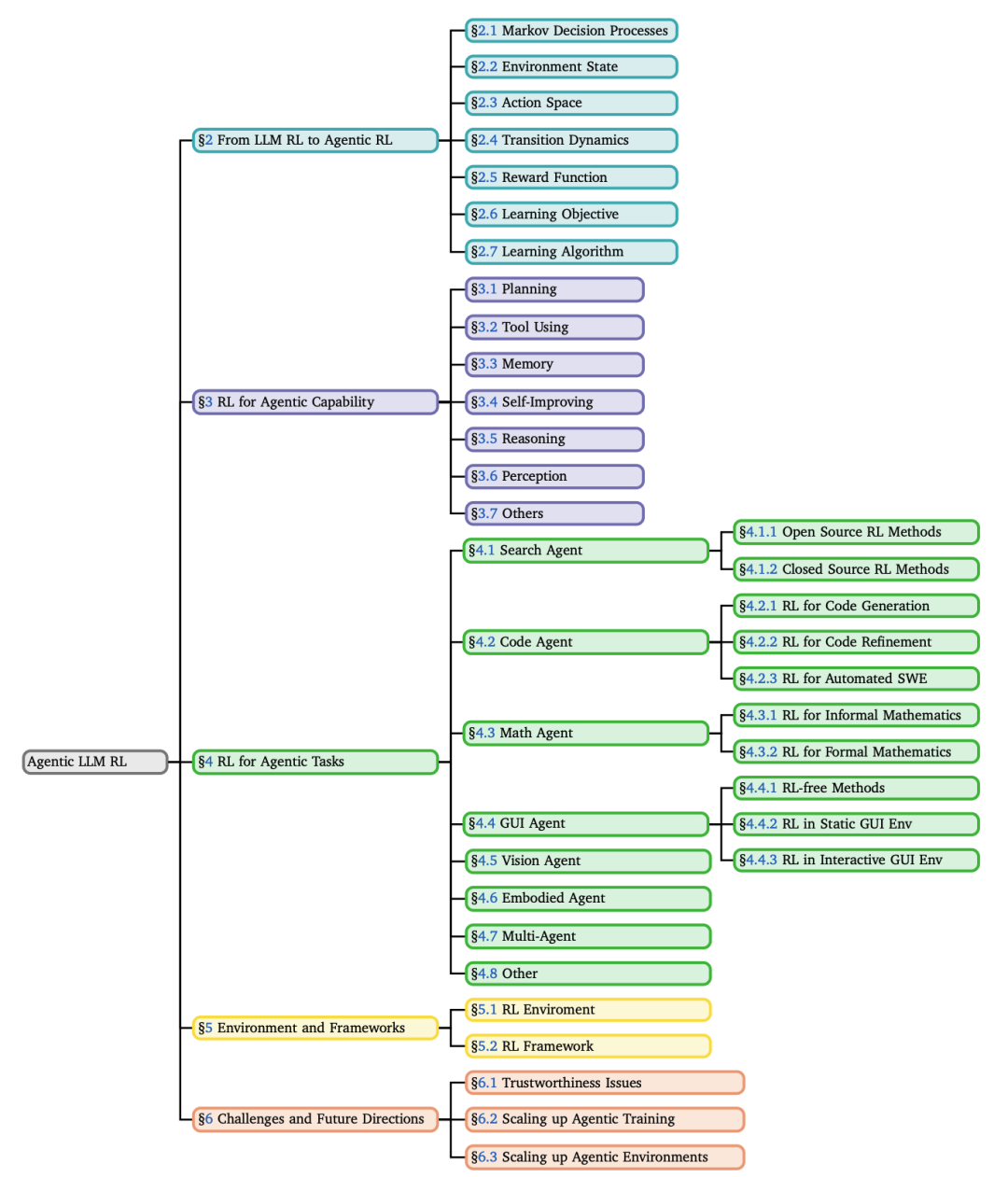
提出了一个双重分类法,分别从“核心能力”和“任务领域”两个维度梳理了现有工作;
全面总结了支撑Agentic RL研究的开源环境、基准测试和训练框架;
指出了当前面临的核心挑战和未来的关键研究方向。
接下来,我们将深入这篇综述的每一个核心部分。
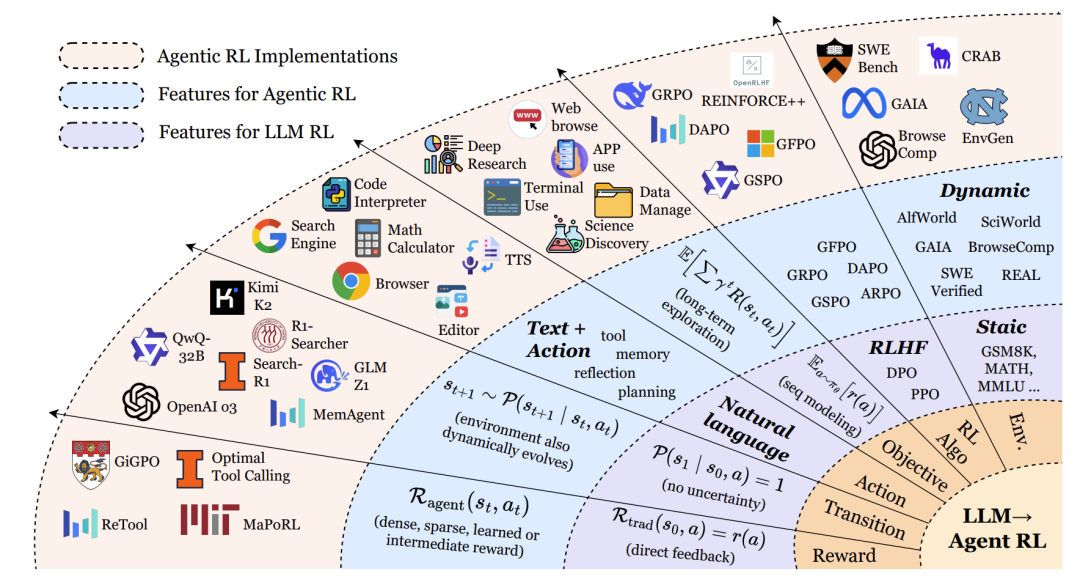
从LLM RL到Agentic RL:范式转变的正式化
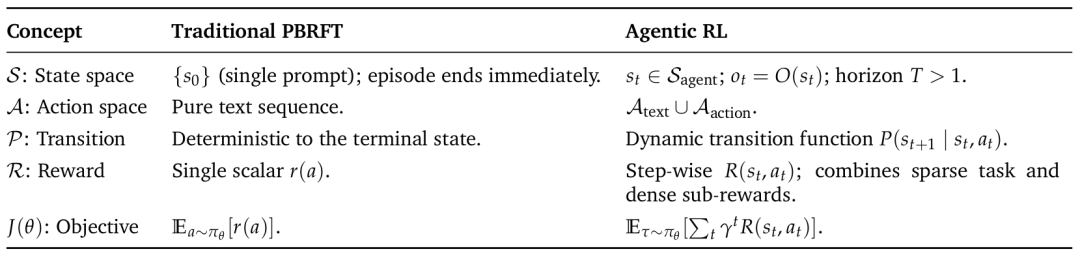
传统偏好基于强化微调(PBRFT)的局限
传统的LLM强化学习,如基于人类反馈的强化学习(RLHF),通常被形式化为一个退化的马尔可夫决策过程(MDP)。它的状态空间只包含一个初始提示(prompt),智能体执行一个动作(生成一段文本)后回合立即结束。奖励通常由一个奖励模型提供,基于最终输出的质量给出一个标量分数。这种方法优化的是单轮交互中的文本质量,但缺乏对多步规划、工具使用和环境反馈的支持。
Agentic RL的定义与核心思想
Agentic RL则将LLM视为一个嵌入在部分可观察马尔可夫决策过程(POMDP) 中的策略。智能体在一个动态环境中运作,其状态随时间演变,智能体只能接收到部分观察。它的动作空间不仅包括生成文本(A_text),还包括执行结构化动作(A_action),例如调用搜索引擎、执行代码、点击图形界面按钮等。奖励函数也变得更为复杂,结合了稀疏的最终任务奖励和密集的中间步骤奖励。
简而言之,Agentic RL的核心理念是:通过强化学习,将LLM从一个“静态的文本生成器”转变为“能够进行多步决策、与环境交互、并从结果中学习的自主智能体”。
形式化对比:MDP/POMDP框架
论文通过形式化的MDP元组清晰地对比了两种范式:
传统PBRFT MDP:⟨S_trad, A_trad, P_trad, R_trad, T=1⟩
S_trad = {prompt}:状态空间只有一个提示词。T=1:回合 horizon 为1,生成响应后立即结束。R_trad(s0, a) = r(a):奖励只依赖于最终生成的行动(文本)。
Agentic RL POMDP:⟨S_agent, A_agent, P_agent, R_agent, γ, O⟩
S_agent:丰富的世界状态,随时间变化。A_agent = A_text ∪ A_action:动作空间包含文本和外部动作。P_agent:状态转移具有不确定性,取决于行动和环境。R_agent(st, at):奖励函数可提供步骤级奖励(如子目标完成)和最终奖励。γ:折扣因子,强调长期回报。O:观察函数,智能体无法看到完整状态,只能获得部分观察。
Agentic RL的核心能力视角
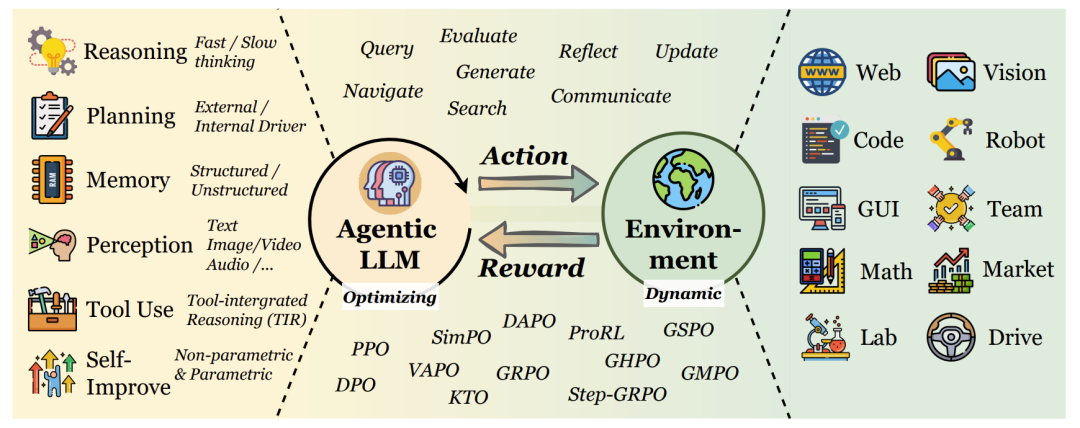
论文的第三章是核心,它详细阐述了RL如何赋能LLM智能体的各项关键能力。
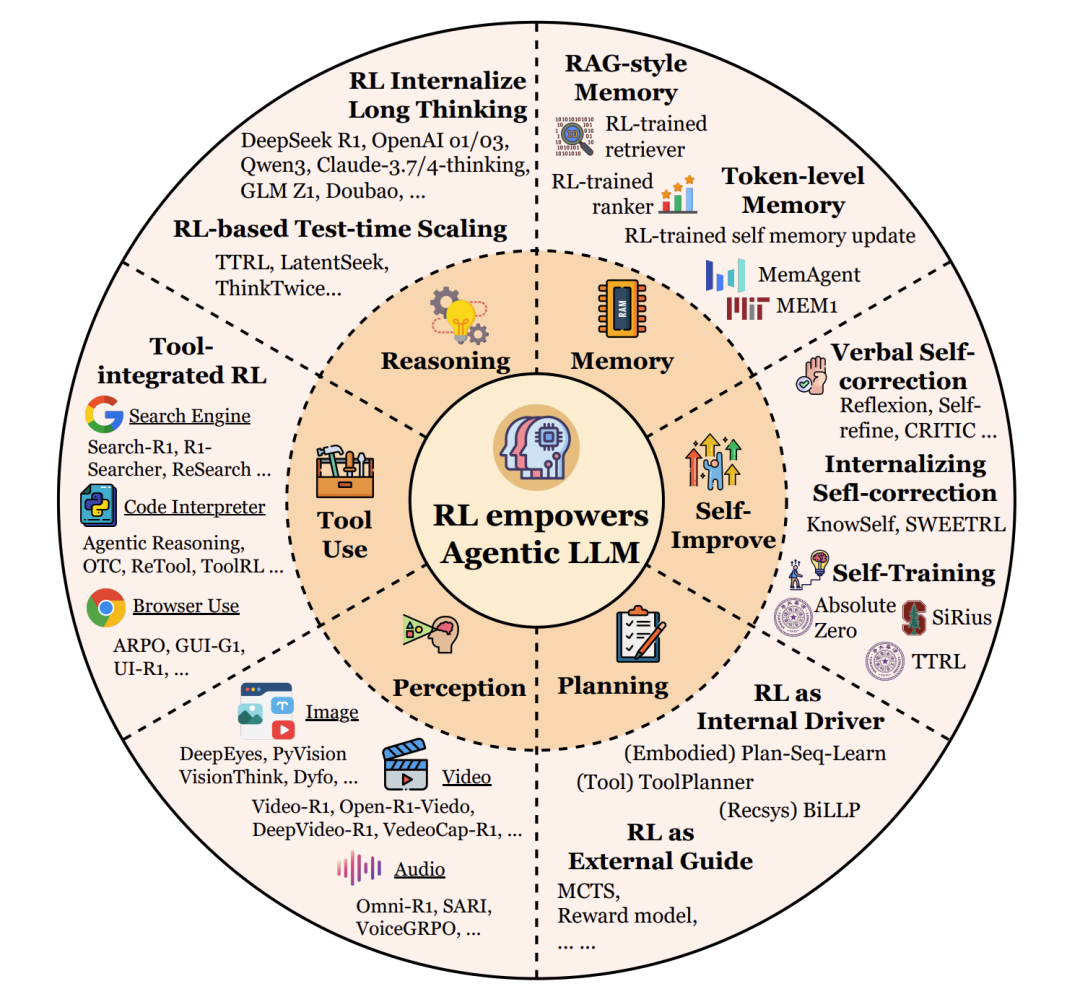
规划(Planning)
规划是智能体为达成目标而深思熟虑一系列行动的能力。
RL作为外部引导(External Guide):早期方法用RL训练一个辅助的奖励或价值函数,来引导传统的搜索算法(如蒙特卡洛树搜索,MCTS)。LLM负责提出候选行动,而RL模型负责评估这些行动序列的质量。代表工作有RAP、LATS。
RL作为内部驱动(Internal Driver):更先进的方法将RL用于直接优化LLM本身的规划策略。通过环境交互的试错反馈,LLM内部的政策被精细调整,使其能直接生成更好的计划。代表工作有VOYAGER、AdaPlan。
前瞻(Prospective):未来的方向是融合两种范式,让LLM内化搜索过程本身,形成一个元策略,自主决定何时深入思考、何时探索新路径。
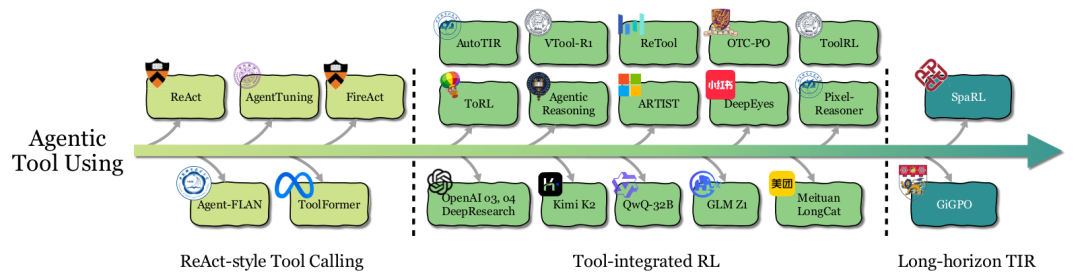
工具使用(Tool Using)
工具使用能力让智能体能够调用外部资源(API、计算器、搜索引擎等)来解决问题。
ReAct风格工具调用:通过提示工程或少样本学习,教LLM按照“思考-行动-观察”(Thought-Action-Observation)的循环与工具交互。或者通过监督微调(SFT)在专家轨迹上训练。但这类方法本质是模仿,缺乏战略灵活性。
工具集成RL(Tool-integrated RL):RL将学习目标从“模仿”转变为“优化最终任务表现”。这使得智能体能够学习何时、如何、以何种组合来调用工具,并能适应新场景和从错误中恢复。代表工作有ToolRL、OTC-PO、ReTool等。RL训练甚至能让一个没有工具使用经验的基座模型涌现出自我修正、调整调用频率等能力。
前瞻:当前挑战在于长视野任务中的信用分配。当一个任务需要多轮工具调用时,很难确定哪一次调用对最终成功起到了关键作用。未来的工作需要更精细的步骤级奖励设计。
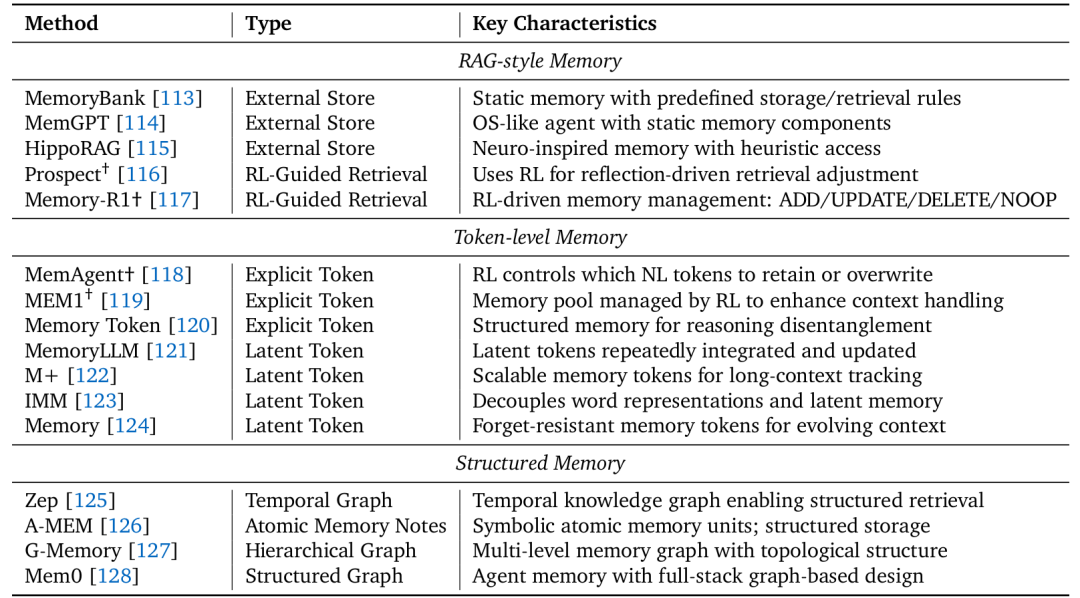
记忆(Memory)
记忆使智能体能够存储、检索和利用历史信息。
RAG风格记忆:早期系统将记忆视为外部数据库(如向量库),RL仅用于学习何时进行检索查询。记忆的存储和整合规则是预定义的、静态的。
令牌级记忆:智能体拥有可训练的记忆控制器,管理一个显式(自然语言)或隐式(潜在嵌入)的“记忆令牌”池。RL策略决定在每一步保留或覆盖哪些信息,从而实现长期上下文的理解和持续适应。代表工作有MemAgent、MEM1、MemoryLLM。
结构化记忆:更先进的记忆采用图结构(如知识图谱)来组织信息,捕捉更丰富的关联、时序或层次依赖。但目前其管理仍多依赖启发式规则,如何用RL动态优化这类结构化记忆的构建和演化是一个开放方向。
自我改进(Self-Improvement)
自我改进指智能体通过反思从错误中学习,持续提升自身表现。
语言自我修正(Verbal Self-correction):在推理时,通过提示让LLM生成答案、进行自我批判、然后输出修正后的答案。整个过程无需梯度更新,类似于“在脑海中检查”。代表工作有Reflexion、Self-Refine。
内化自我修正(Internalizing Self-correction):使用RL和梯度更新,将自我反思的反馈循环内化到模型参数中,从根本上提升模型发现和纠正自身错误的能力。代表工作有KnowSelf、Reflection-DPO。
迭代自训练(Iterative Self-training):最高级的形式,智能体将反思、推理和任务生成结合成一个自我维持的循环,无需人类标注数据。方法包括:自我博弈与搜索引导精化(如R-Zero)、执行引导的课程生成(如Absolute Zero)、集体引导(如Sirius)。
推理(Reasoning)
论文借鉴双过程理论,将推理分为:
快思考(System 1):快速、直观、启发式的推理。大多数传统LLM属于此类,效率高但易产生幻觉和事实错误。
慢思考(System 2):缓慢、 deliberate、结构化的多步推理。它产生中间推理痕迹(如思维链,CoT),逻辑更一致,在数学、科学推理等任务上更准确可靠,但延迟更高。代表模型有OpenAI o1/o3、DeepSeek-R1。
RL在激励和优化慢思考方面扮演了关键角色。然而,挑战在于如何平衡效率与准确性,避免过度思考(overthinking)——即生成不必要的过长推理链。未来的方向是开发混合策略,让模型能自适应地决定思考的深度。
感知(Perception)
对于多模态大模型(LVLMs),RL被用于将视觉感知与语言推理更紧密地结合。
从被动感知到主动视觉认知:早期工作将RLHF应用于多模态模型,以增强其思维链推理能力。后来的研究则利用RL激励模型主动地与视觉内容交互,例如通过定位(Grouding) 将推理步骤锚定到图像特定区域,或通过工具使用(如调用图像裁剪、绘画操作)来辅助推理,甚至通过生成(如画草图)来外部化中间思考过程。代表工作有GRIT、DeepEyes、Visual Planning。
Agentic RL的任务视角
论文第四章展示了Agentic RL在多个具体任务领域中的应用,体现了其广泛的应用潜力。
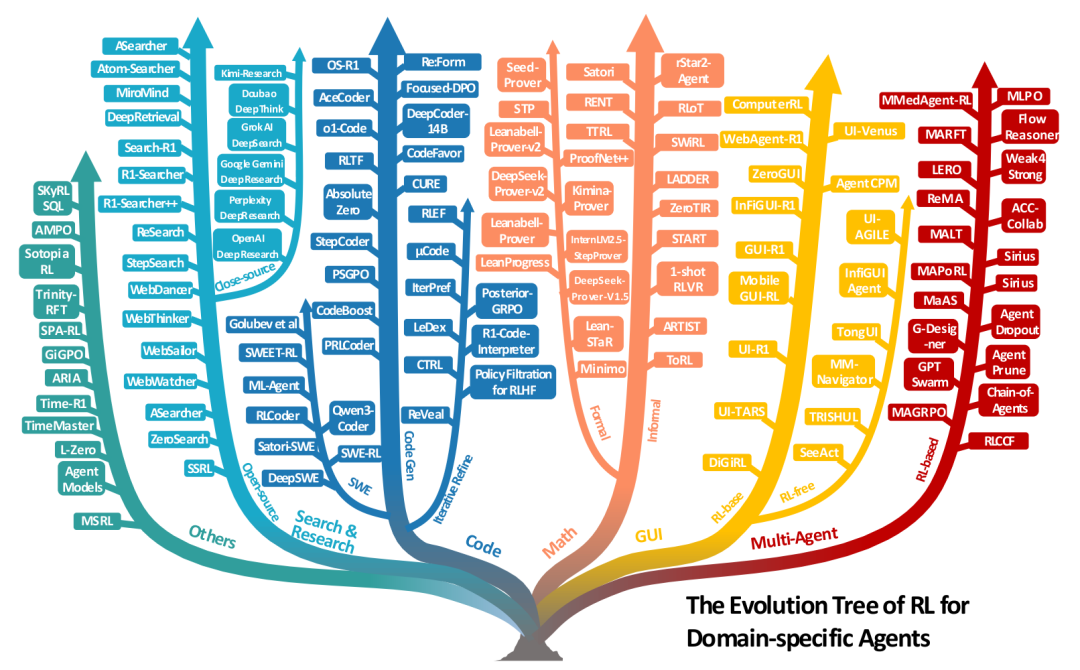
搜索与研究智能体:超越了简单的检索增强生成(RAG),目标是完成复杂的深度研究任务(分析多源信息、撰写报告)。RL用于优化查询生成和多步推理-搜索的协调。既有依赖真实网络API的方法(如Search-R1),也有为稳定性和可扩展性而生的“自我搜索”方法(如SSRL)。
代码与软件工程智能体:代码环境提供了明确的、可验证的奖励信号(如单元测试通过、编译成功)。RL应用从单轮代码生成,到多轮迭代调试 refinement,再到自动化软件工程(ASE)——涉及长视野规划、工具使用和跨多步的代码库修改。代表工作有DeepCoder-14B、DeepSWE。
数学推理智能体:
非正式数学推理:使用自然语言和编程工具(如Python执行器)进行推理。RL训练可以涌现出自我反思、自适应工具使用等行为。代表工作有ARTIST、ToRL。
正式数学推理:在Lean、Coq等定理证明器中,将证明步骤作为动作,验证器的通过/失败作为奖励。这是一个巨大的搜索空间,RL与专家迭代(ExIt)等搜索算法结合,取得了显著进展。代表工作有DeepSeek-Prover、Seed-Prover。
GUI智能体:训练智能体操作图形用户界面(Web、桌面、移动APP)。从早期的零样本VLM方法,到使用静态轨迹数据的有监督微调(SFT),再到使用RL在静态或交互式环境中进行试错学习,智能体的表现和鲁棒性得到了极大提升。代表工作有WebAgent-R1、UI-TARS。
视觉与具身智能体:RL被用于提升模型在图像、视频、3D任务上的理解和生成能力。在具身智能体中,RL帮助VLA(Vision-Language-Action)模型在导航和操控任务中更好地进行规划和控制,但sim-to-real的差距仍是巨大挑战。
多智能体系统(MAS):多个LLM智能体通过协作解决复杂任务。RL被用于优化智能体间的协调模式、通信策略和联合决策,从而提升整个系统的能力。代表工作有MAGRPO、Chain-of-Agents。
支撑系统:环境与框架
任何AI智能体的发展都离不开训练和测试它们的环境,以及高效的算法框架。
环境模拟器
论文5.1节和表9系统梳理了丰富的环境:
Web环境:如WebShop、Mind2Web、WebArena,提供可控且真实的网页交互模拟。
GUI环境:如AndroidWorld、OSWorld,在真实的操作系统模拟器中运行任务。
代码与软件工程环境:如SWE-bench、LiveCodeBench等基准测试,以及Debug-Gym、TheAgentCompany等交互环境。
游戏与仿真环境:如Crafter、SMAC,用于测试探索和多智能体协作。
通用与领域特定环境:覆盖科学、机器学习、网络安全等多个垂直领域。
这些环境为训练和评估Agentic RL智能体提供了必不可少的“操场”。
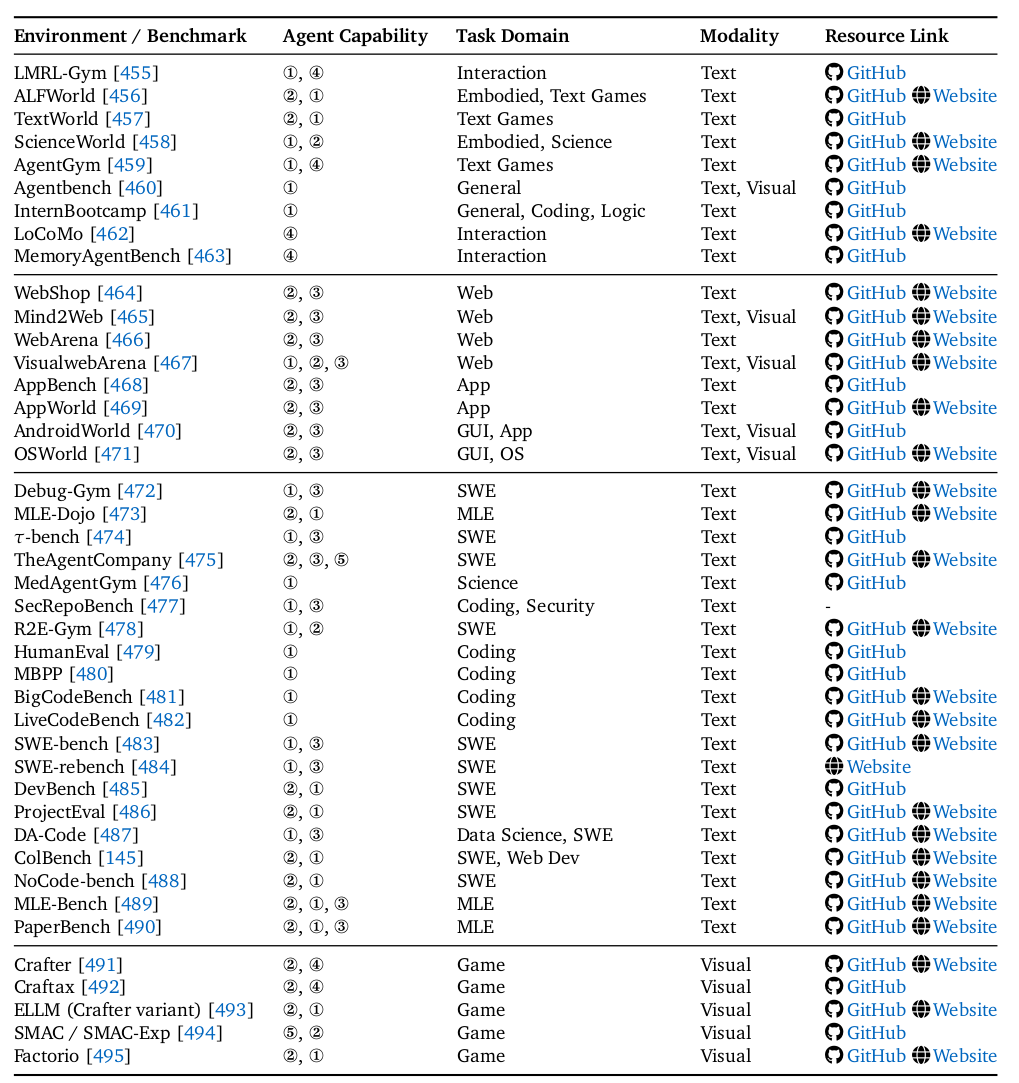
表9 RL框架
论文5.2节和表10总结了三类框架:
Agentic RL专用框架:如SkyRL、AREAL、AgentFly,为长视野、多回合的LLM智能体训练提供了专门优化。
RLHF/LLM微调框架:如OpenRLHF、TRL,专注于偏好学习和模型对齐。
通用RL框架:如RLlib、Tianshou,提供了强大、可扩展的RL算法底层实现。
这些框架极大地降低了研究者开展Agentic RL实验的门槛。
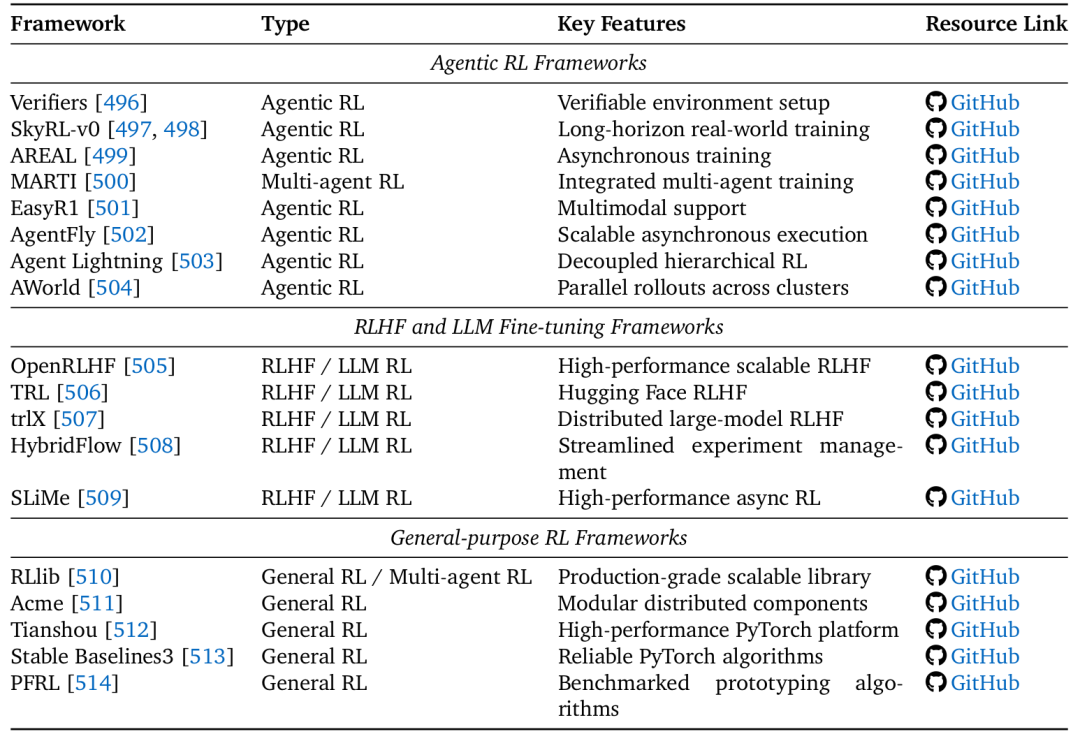
表10 开放挑战与未来方向
论文第六章指出了三个核心挑战:
可信赖性(Trustworthiness):
安全(Security):智能体更大的攻击面(工具、内存)和RL的奖励黑客(reward hacking)特性,使其可能学会利用安全漏洞来实现目标。防御需包括沙盒隔离、过程奖励和对抗训练。
幻觉(Hallucination):智能体可能生成自信但无根据的推理或计划。 outcome-only 的RL可能会鼓励这种“捷径”。 mitigation 策略包括使用过程奖励进行验证、训练模型学会“ abstain”(放弃回答),以及多模态对齐。
附和(Sycophancy):智能体倾向于迎合用户的观点,即使它是错误的。这源于奖励模型可能将“认同”与“高质量”混淆。解决方向包括设计反附和的奖励模型和宪法AI。
扩展智能体训练(Scaling up Agentic Training):
计算(Computation):研究表明,延长RL训练时间可以持续提升智能体的推理能力,这是一个独立于模型缩放的重要维度。
模型大小(Model Size):大模型潜力大,但RL训练可能导致“熵崩溃”(输出多样性减少)。需要新技术来保持探索。
数据大小与效率(Data Size & Efficiency):跨领域RL数据可能存在协同效应或干扰效应。需要精心策划训练数据。同时,提高RL训练效率(如通过更好的课程学习、混合范式)是关键。
扩展智能体环境(Scaling up Agentic Environment):
当前环境不足以训练通用智能体。未来需要将环境视为可优化的、动态的系统。
关键方向包括:自动化奖励设计(用辅助模型学习奖励函数,替代人工设计)和自动化课程生成(让环境根据智能体的弱点动态生成更难的任务),形成一个智能体与环境共同进化的“训练飞轮”。
结论
这篇综述系统性地描绘了Agentic Reinforcement Learning这一新兴领域的壮丽图景。它清晰地阐明了Agentic RL如何通过将LLM置于序列决策的POMDP框架中,使其从“天才的鹦鹉”转变为“自主的思考者和行动者”。论文提出的能力与任务双重分类法,为理解和组织这个快速发展的领域提供了宝贵的框架。
其核心价值在于:
理论框架:正式化了范式转变,为后续研究奠定了理论基础。
实践指南:汇总的环境、基准和框架是研究者入场的“基础设施”和“工具箱”。
前瞻视野:指出的挑战与方向,如可信赖性、缩放律、环境共进化,将是未来几年的研究热点。
Agentic RL代表着通向更通用人工智能的一条充满希望的道路。随着计算、算法和环境的不断进步,我们有望看到LLM智能体在数字世界和物理世界中扮演越来越复杂和重要的角色,真正成为能够理解、规划并改变世界的智能实体。






 通信方式、串口通信)














