目录
- 1.官方的描述
- 2.HAL的流程
- 把接收到的数据从PMA拷贝到用户自己定义的空间中
- 3.处理接收到的数据
- 4.最后再次开启准备接收工作
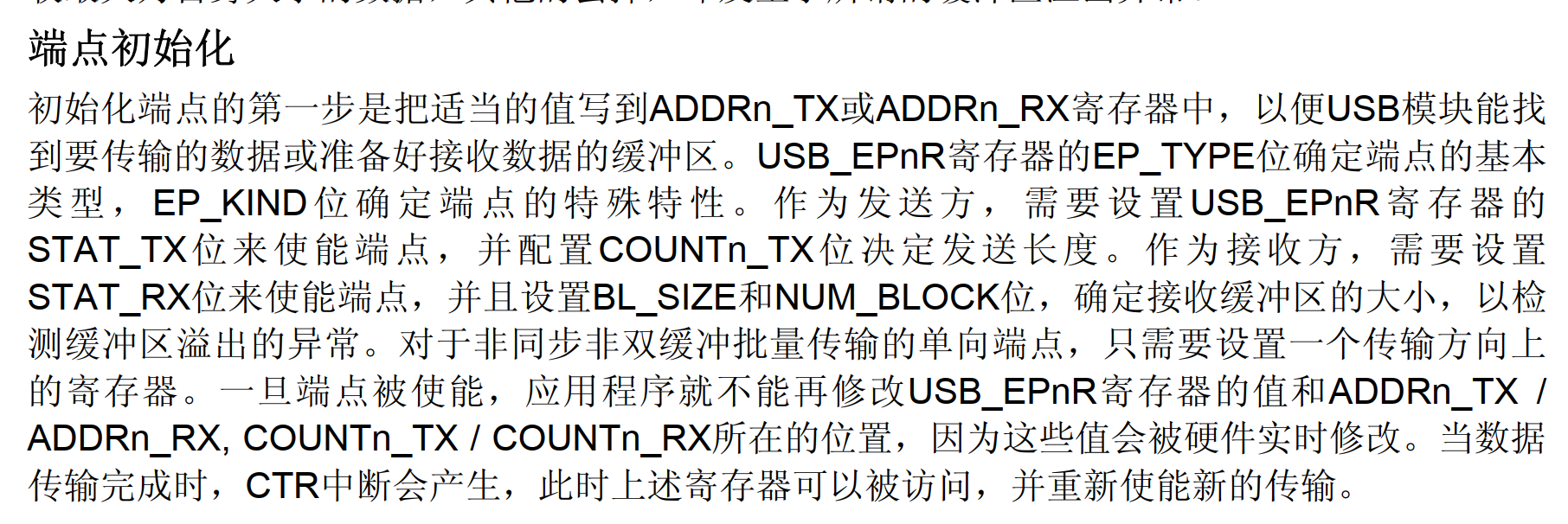
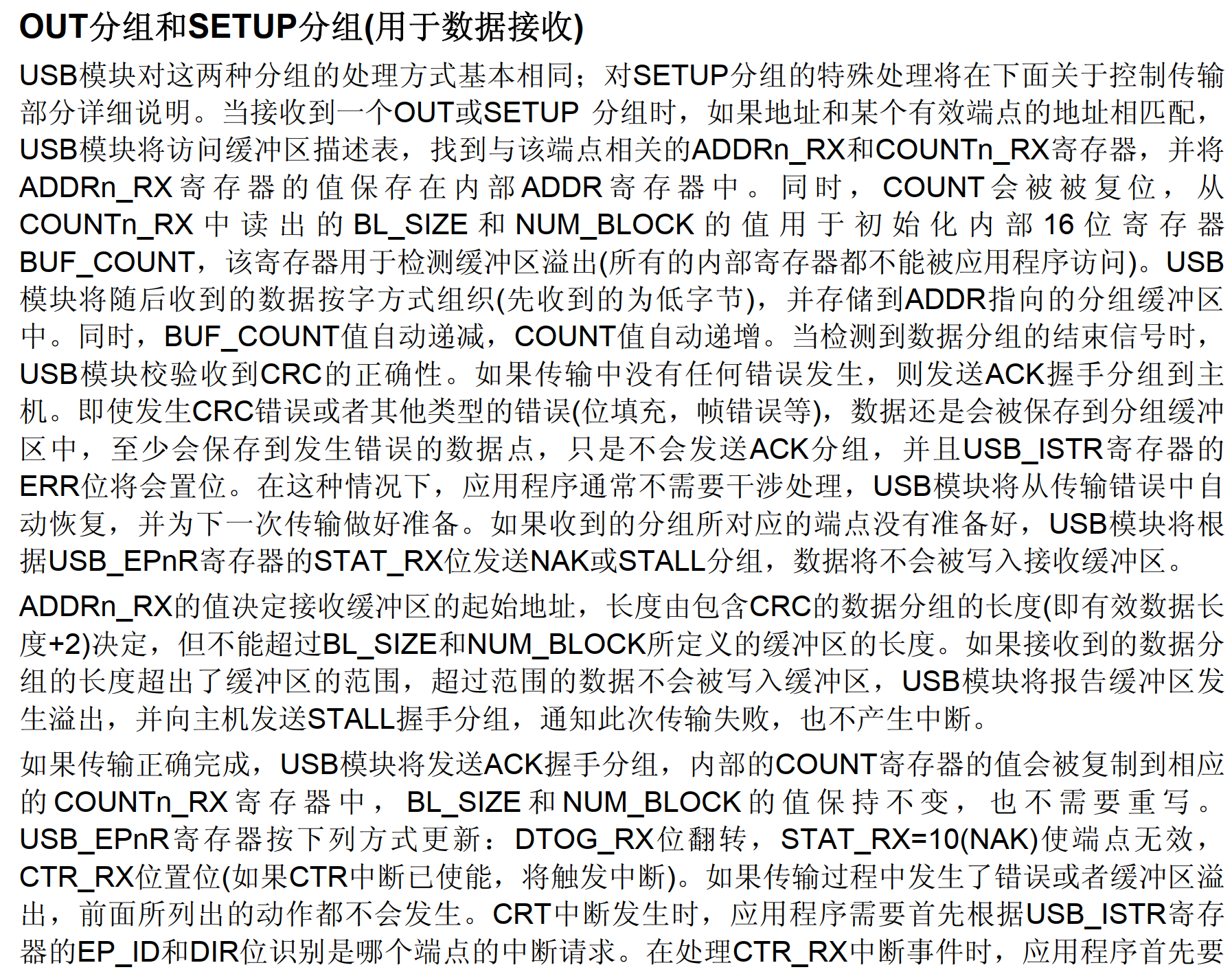
1.官方的描述

2.HAL的流程
以上的官方说法我们暂时按下不表。
如果接收到数据,会激活中断进入到USB_LP_CAN1_RX0_IRQHandler()->HAL_PCD_IRQHandler()
因为所有的中断事件共用一个中断函数,所以第一步要进行中断类型检测,中断的信息都写在了ISTR寄存器中,判断代码如下:
if (__HAL_PCD_GET_FLAG(hpcd, USB_ISTR_CTR)){/* servicing of the endpoint correct transfer interrupt *//* clear of the CTR flag into the sub */(void)PCD_EP_ISR_Handler(hpcd);}
下一步自然而然的就是执行这个函数:
(void)PCD_EP_ISR_Handler(hpcd);
既然进入中断了,我们还是要验证一下ISTR的正确传输中断有没有置位
while ((hpcd->Instance->ISTR & USB_ISTR_CTR) != 0U)
技术手册提示:可以通过DIR和EPID来判断是哪个端点,接下来的代码也是符合这个步骤的,下面的步骤是判断了哪个端点,暂时没有判断方向,一些逻辑执行完毕后,就会判断方向了,详细看后面的代码。
wIstr = hpcd->Instance->ISTR;/* extract highest priority endpoint number */
epindex = (uint8_t)(wIstr & USB_ISTR_EP_ID);if (epindex == 0U)
{
}else if (epindex == 1U){//我们真正使用的端点}下一步拿到端点寄存器的数据,看看CTR_RX有没有接收到数据
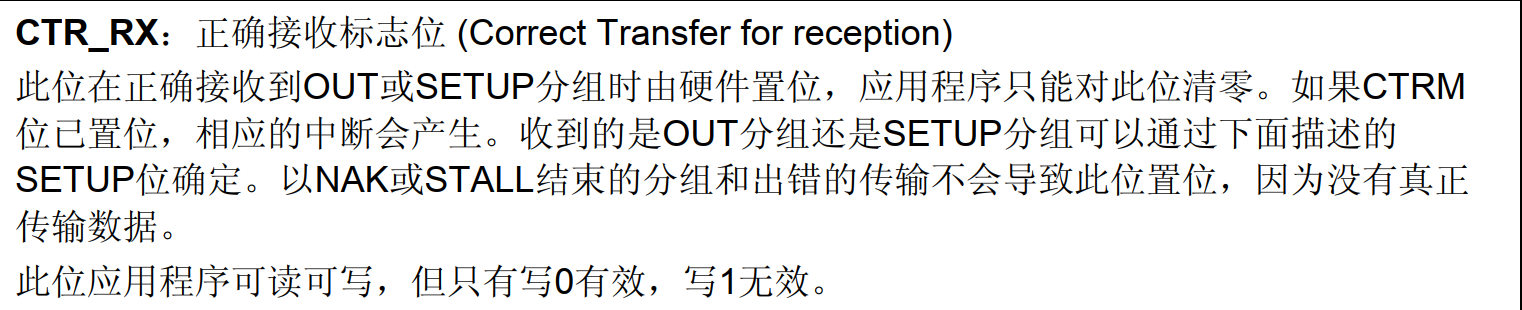
如果接收到第一步就是把标志位清除掉
下面的图片,发现正确接收标志位置1,CTRM置位,就会产生中断,CTRM位说,如果中断状态寄存器置1就会产生中断,这里面就说明任何端点正确接收置1后,中断状态寄存器也置1,这是一个联动反应
wEPVal = PCD_GET_ENDPOINT(hpcd->Instance, epindex);if ((wEPVal & USB_EP_CTR_RX) != 0U){/* clear int flag */PCD_CLEAR_RX_EP_CTR(hpcd->Instance, epindex);
紧接着,HAL库把OUT_ep结构体拿过来,这里面记录了所有规定的端点信息,在初始化阶段把这部分信息预先储存到结构体里面的。
ep = &hpcd->OUT_ep[epindex];/* OUT Single Buffering */if (ep->doublebuffer == 0U){count = (uint16_t)PCD_GET_EP_RX_CNT(hpcd->Instance, ep->num);if (count != 0U){USB_ReadPMA(hpcd->Instance, ep->xfer_buff, ep->pmaadress, count);}}
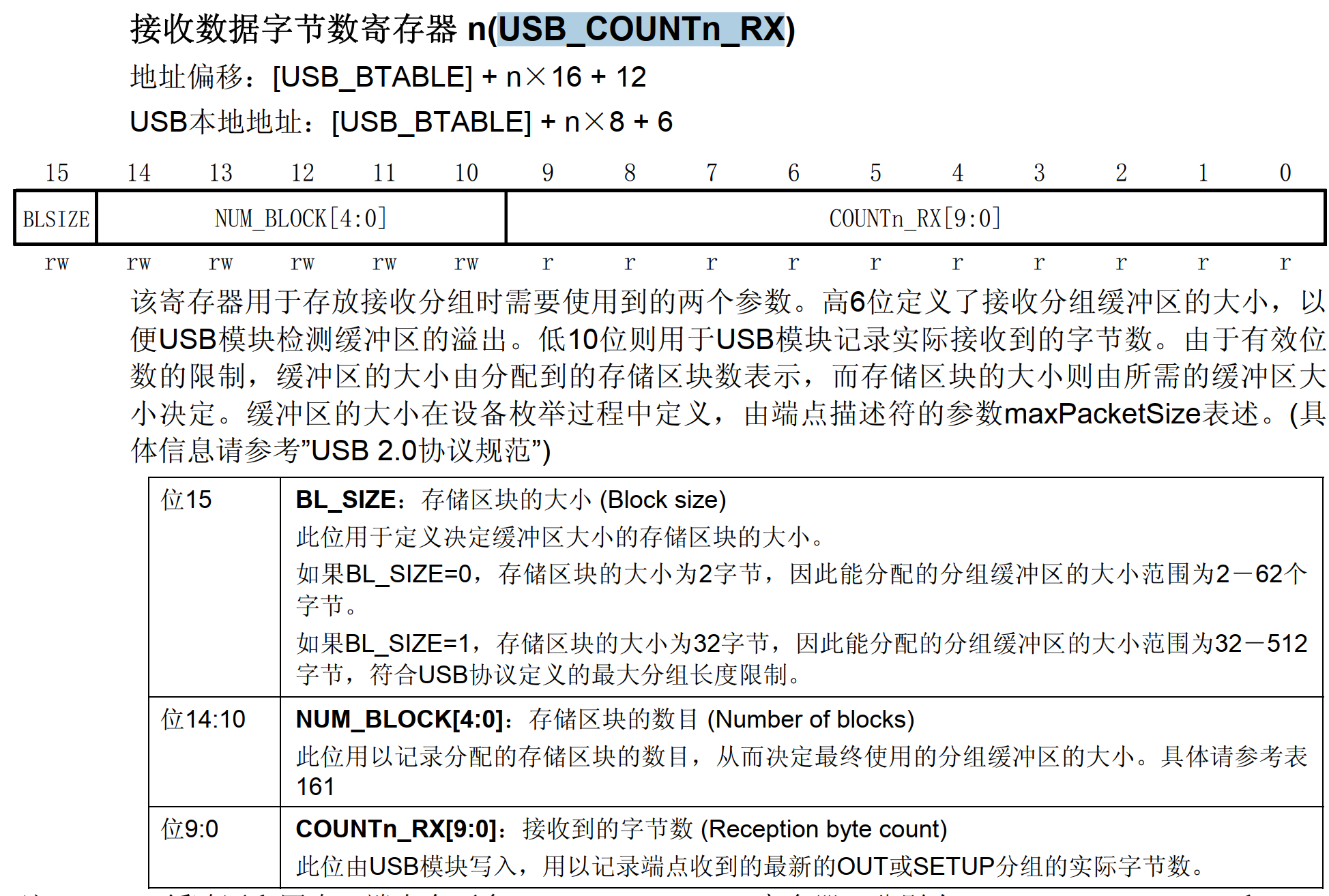
其中 count = (uint16_t)PCD_GET_EP_RX_CNT(hpcd->Instance, ep->num);这条语句,
//先拿到对应端点缓冲表USB_COUNTn_RX的数据
#define PCD_EP_RX_CNT(USBx, bEpNum) ((uint16_t *)((((uint32_t)(USBx)->BTABLE\+ ((uint32_t)(bEpNum) * 8U) + 6U) * PMA_ACCESS) + ((uint32_t)(USBx) + 0x400U)))//把USB_COUNTn_RX中的高于9位的信息删除掉,只保留COUNTn_RX(实际接收到的数据)
#define PCD_GET_EP_RX_CNT(USBx, bEpNum) ((uint32_t)(*PCD_EP_RX_CNT((USBx), (bEpNum))) & 0x3ffU)
到了对关键的一步,就数据从缓冲区里面,拷贝到用户的自定义区
if (count != 0U){USB_ReadPMA(hpcd->Instance, ep->xfer_buff, ep->pmaadress, count);}
注意一下参数:从上面看,最后接收到的数据,其实是放在对应端点结构体的xfter_buff里面的,现在就是只要拿到对应端点结构体的句柄,就能找到接收到的数据
(这个在接收数据完成之后定义的连接,需要结合后面代码看)

把接收到的数据从PMA拷贝到用户自己定义的空间中
/*** @brief Copy data from packet memory area (PMA) to user memory buffer* @param USBx USB peripheral instance register address.* @param pbUsrBuf pointer to user memory area.* @param wPMABufAddr address into PMA.* @param wNBytes no. of bytes to be copied.* @retval None*/
/*** @brief Copy data from packet memory area (PMA) to user memory buffer* @param USBx USB peripheral instance register address.* @param pbUsrBuf pointer to user memory area.* @param wPMABufAddr address into PMA.* @param wNBytes no. of bytes to be copied.* @retval None*/
void USB_ReadPMA(USB_TypeDef *USBx, uint8_t *pbUsrBuf, uint16_t wPMABufAddr, uint16_t wNBytes)
{// 计算需要处理的16位数据单元的数量(每个单元包含2个字节),比如接收了64字节,>>1,变成了32字节uint32_t n = (uint32_t)wNBytes >> 1;// 计算USB外设的基地址uint32_t BaseAddr = (uint32_t)USBx;// 用于循环计数和临时存储数据的变量uint32_t i, temp;// 定义一个指向PMA中16位数据的指针__IO uint16_t *pdwVal;// 定义一个指向用户缓冲区的指针uint8_t *pBuf = pbUsrBuf;// 计算PMA中目标数据的起始地址pdwVal = (__IO uint16_t *)(BaseAddr + 0x400U + ((uint32_t)wPMABufAddr * PMA_ACCESS));// 循环处理每个16位数据单元for (i = n; i != 0U; i--){// 从PMA中读取一个16位数据temp = *(__IO uint16_t *)pdwVal;pdwVal++;// 将16位数据的低8位存储到用户缓冲区*pBuf = (uint8_t)((temp >> 0) & 0xFFU);pBuf++;// 将16位数据的高8位存储到用户缓冲区*pBuf = (uint8_t)((temp >> 8) & 0xFFU);pBuf++;// 如果PMA访问的步长大于1,则跳过一个额外的单元(可能是因为硬件设计)
#if PMA_ACCESS > 1UpdwVal++;
#endif}// 如果剩余的字节数不是2的倍数(即还有1个字节未处理)if ((wNBytes % 2U) != 0U){// 从PMA中读取最后一个字节temp = *pdwVal;*pBuf = (uint8_t)((temp >> 0) & 0xFFU);}
}
#endif /* defined (USB) */
关于接收完成标志
可以看到这里有一个判断条件if ((ep->xfer_len == 0U) || (count <= ep->maxpacket)),其中ep->xfer_len == 0U)是给控制传输用的,他需要严格的控制包数,count <= ep->maxpacket是给中断传输用的,只要不大于最大包,就是传输完成(短包)
/* multi-packet on the NON control OUT endpoint */ep->xfer_count += count;ep->xfer_buff += count;if ((ep->xfer_len == 0U) || (count <= ep->maxpacket)){/* RX COMPLETE */
3.处理接收到的数据
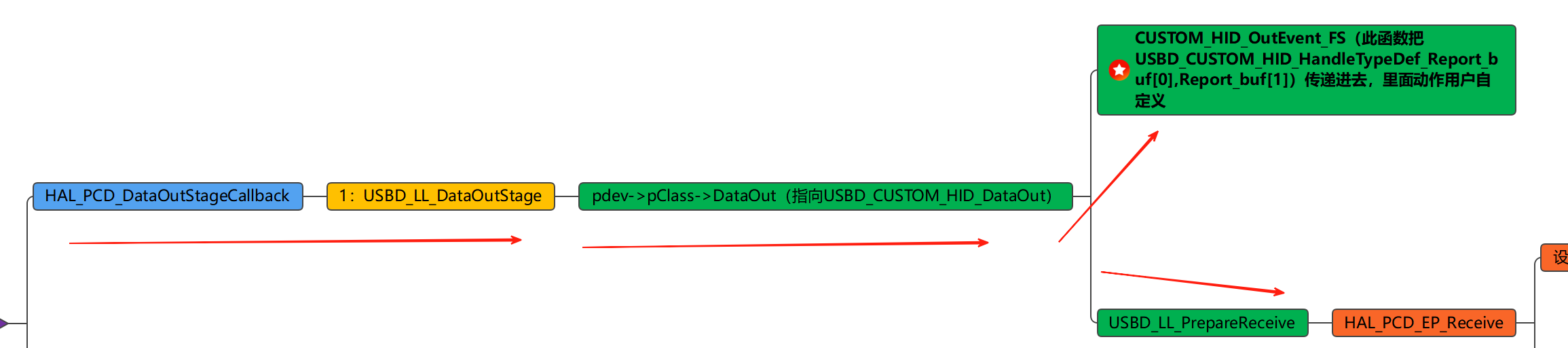
USBD_StatusTypeDef USBD_LL_DataOutStage(USBD_HandleTypeDef *pdev,uint8_t epnum, uint8_t *pdata)
{USBD_EndpointTypeDef *pep;if (epnum == 0U){//一些实现代码}else if ((pdev->pClass->DataOut != NULL) &&(pdev->dev_state == USBD_STATE_CONFIGURED)){pdev->pClass->DataOut(pdev, epnum);}else{/* should never be in this condition */return USBD_FAIL;}return USBD_OK;
}
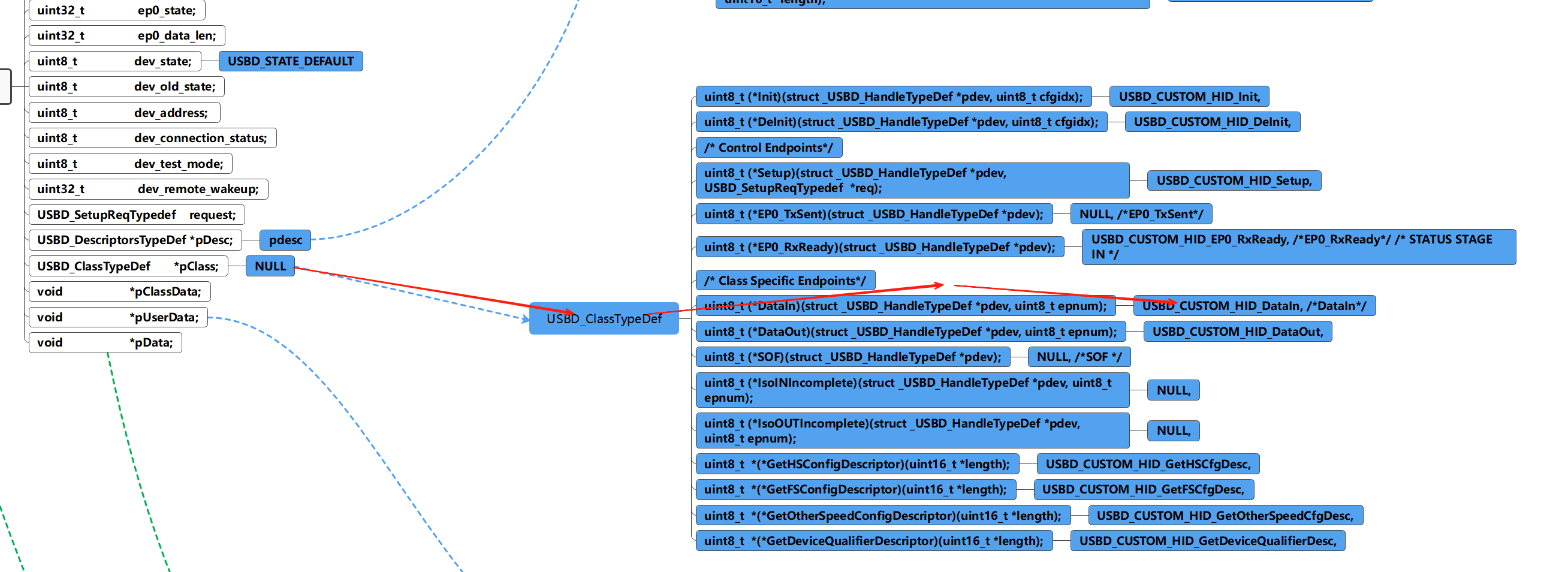
USBD_ClassTypeDef USBD_CUSTOM_HID =
{USBD_CUSTOM_HID_Init,USBD_CUSTOM_HID_DeInit,USBD_CUSTOM_HID_Setup,NULL, /*EP0_TxSent*/USBD_CUSTOM_HID_EP0_RxReady, /*EP0_RxReady*/ /* STATUS STAGE IN */USBD_CUSTOM_HID_DataIn, /*DataIn*/USBD_CUSTOM_HID_DataOut,NULL, /*SOF */NULL,NULL,USBD_CUSTOM_HID_GetHSCfgDesc,USBD_CUSTOM_HID_GetFSCfgDesc,USBD_CUSTOM_HID_GetOtherSpeedCfgDesc,USBD_CUSTOM_HID_GetDeviceQualifierDesc,
};
阅读上面代码,发现最终执行了pdev->pClass->DataOut(pdev, epnum);这个函数指针。
下图是在初始化阶段就绑定好的函数指针,可以找到真正执行的函数名字是
USBD_CUSTOM_HID_DataOut->
/**
/*** @brief USBD_CUSTOM_HID_DataOut* handle data OUT Stage* @param pdev: device instance* @param epnum: endpoint index* @retval status*/
static uint8_t USBD_CUSTOM_HID_DataOut(USBD_HandleTypeDef *pdev,uint8_t epnum)
{USBD_CUSTOM_HID_HandleTypeDef *hhid = (USBD_CUSTOM_HID_HandleTypeDef *)pdev->pClassData;((USBD_CUSTOM_HID_ItfTypeDef *)pdev->pUserData)->OutEvent(epnum,hhid->Report_buf[0],hhid->Report_buf[1]);USBD_LL_PrepareReceive(pdev, CUSTOM_HID_EPOUT_ADDR, hhid->Report_buf,USBD_CUSTOMHID_OUTREPORT_BUF_SIZE);return USBD_OK;
}
下一步执行这个函数指针,实际是CUSTOM_HID_OutEvent_FS(uint8_t epnum, uint8_t event_idx, uint8_t state)这个函数
/*** @brief Manage the CUSTOM HID class events* @param event_idx: Event index* @param state: Event state* @retval USBD_OK if all operations are OK else USBD_FAIL*/
static int8_t CUSTOM_HID_OutEvent_FS(uint8_t epnum, uint8_t event_idx, uint8_t state)
{/* USER CODE BEGIN 6 */USBD_CUSTOM_HID_HandleTypeDef *hhid = (USBD_CUSTOM_HID_HandleTypeDef*)hUsbDeviceFS.pClassData;for( uint8_t i = 0;i <USBD_CUSTOMHID_OUTREPORT_BUF_SIZE;i++){USB_Recive_Buffer[i] = hhid->Report_buf[i];}HID_RxCpltCallback((uint8_t)epnum,&USB_Recive_Buffer);return (USBD_OK);/* USER CODE END 6 */
}
这个函数又把把数据从(USBD_CUSTOM_HID_HandleTypeDef*)hUsbDeviceFS.pClassData.Report_buf,转移到了我们自定义的区域,这个Report区域和对应端点的区域是相等的,在下面的再次准备接收阶段定义好了

并且调用了这个函数来解析数据HID_RxCpltCallback((uint8_t)epnum,&USB_Recive_Buffer);
4.最后再次开启准备接收工作

执行了这个函数
USBD_LL_PrepareReceive(pdev, CUSTOM_HID_EPOUT_ADDR, hhid->Report_buf,USBD_CUSTOMHID_OUTREPORT_BUF_SIZE);HAL_StatusTypeDef HAL_PCD_EP_Receive(PCD_HandleTypeDef *hpcd, uint8_t ep_addr, uint8_t *pBuf, uint32_t len)
{PCD_EPTypeDef *ep;ep = &hpcd->OUT_ep[ep_addr & EP_ADDR_MSK];/*setup and start the Xfer */ep->xfer_buff = pBuf;ep->xfer_len = len;ep->xfer_count = 0U;ep->is_in = 0U;ep->num = ep_addr & EP_ADDR_MSK;if ((ep_addr & EP_ADDR_MSK) == 0U){(void)USB_EP0StartXfer(hpcd->Instance, ep);}else{(void)USB_EPStartXfer(hpcd->Instance, ep);}return HAL_OK;
}上面函数,把接收端口的一些存数据的地址,接收长度,计数等等信息复位
AL_StatusTypeDef USB_EPStartXfer(USB_TypeDef *USBx, USB_EPTypeDef *ep)
{uint32_t len;uint16_t pmabuffer;uint16_t wEPVal;/* IN endpoint */if (ep->doublebuffer == 0U){/* Multi packet transfer */if (ep->xfer_len > ep->maxpacket){len = ep->maxpacket;ep->xfer_len -= len;}else{len = ep->xfer_len;ep->xfer_len = 0U;}/* configure and validate Rx endpoint */PCD_SET_EP_RX_CNT(USBx, ep->num, len);








解析)
 -> 创建端云一体化开发工程)



 之后,pytorch模型的性能会很差?为什么 dropout 影响性能?| 深度学习)
![[爬虫知识] http协议](http://pic.xiahunao.cn/[爬虫知识] http协议)


】:使用 Django REST Framework 构建项目与模块 CRUD API)

