manycore-research/PlankAssembly | DeepWiki
PlankAssembly项目原理
这个项目是一个基于深度学习的3D重建系统,其核心原理是从三个正交视图的工程图纸中重建出3D形状的结构化程序表示。
核心技术原理
1. 问题定义
PlankAssembly旨在从三个正交视图的工程图纸中进行鲁棒的3D重建,使用学习到的形状程序来表示3D结构 README.md:3 。项目支持三种类型的输入:可见和隐藏线条、仅可见边缘、以及侧面视图 README.md:38 。
2. 模型架构
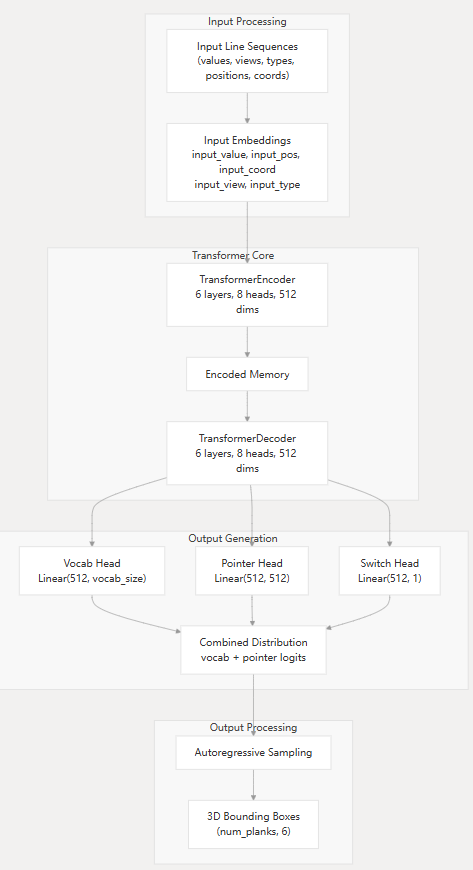
项目采用了基于Transformer的序列到序列(Sequence-to-Sequence)架构:
- 编码器-解码器结构:使用标准的Transformer编码器和解码器来处理输入线条序列并生成输出形状程序 models.py:59-69
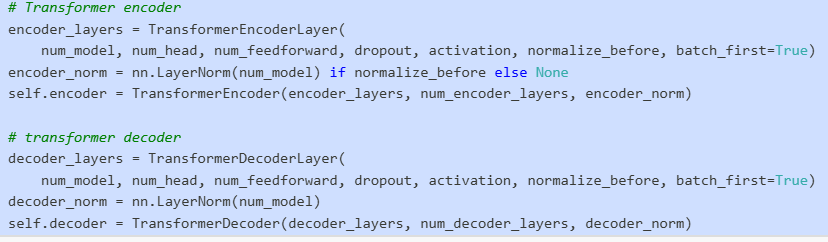
TransformerEncoderLayer 在 PlankModel 中的使用
在 PlankAssembly 系统中,TransformerEncoderLayer 是从 PyTorch 导入的标准 Transformer 编码器层,用于构建 PlankModel 的编码器部分。 models.py:7-8
具体实现中,TransformerEncoderLayer 在 PlankModel 的初始化过程中被配置: models.py:60-63
这里创建了一个编码器层,配置了以下参数:
num_model: 隐藏维度 (默认 512)num_head: 多头注意力头数 (默认 8)num_feedforward: 前馈网络维度 (默认 1024)dropout: Dropout 率activation: 激活函数normalize_before: 是否在注意力前进行层归一化batch_first=True: 批次维度在第一位
在训练系统中的作用
这个 TransformerEncoderLayer 是整个训练系统的核心组件,通过 build_model(cfg) 函数在训练器中被实例化。 trainer_complete.py:29
训练过程中,编码器处理输入的 2D 线条数据序列,为后续的解码器生成 3D 边界框预测提供编码表示。
Notes
TransformerEncoderLayer 是 PyTorch 标准库的组件,在这个项目中被用作 PlankModel 架构的编码器部分。该模型支持多种输入模态(完整线条、可见线条、侧面数据),都使用相同的 Transformer 编码器架构进行处理。
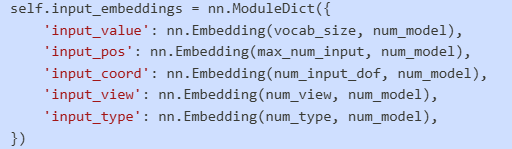
- 多模态嵌入:输入序列包含多种信息维度的嵌入,包括数值、位置、坐标、视图和类型信息 models.py:47-53
3. 输入表示
输入的工程图纸被转换为结构化的线条序列:
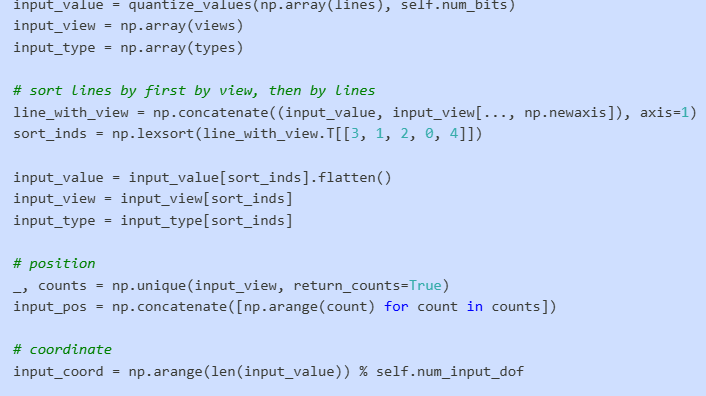
- 每条线段用4个自由度表示(x1, y1, x2, y2坐标) line_data.py:36-46
- 线条按视图和坐标进行排序,并添加位置、视图和类型等元信息 line_data.py:41-58
4. 输出表示
输出是量化的3D形状程序,每个"板块"(plank)用6个自由度的边界框表示 models.py:25 。输出序列经过量化处理并添加特殊标记 line_data.py:87-94 。
5. 指针网络机制
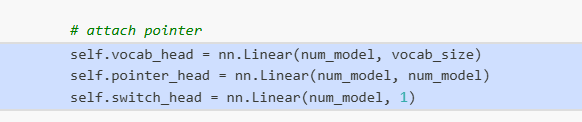
项目的一个关键创新是使用了指针网络(Pointer Network)机制:
- 词汇表分布:用于生成新的token
- 指针分布:用于指向之前生成的序列元素
- 切换机制:动态决定是从词汇表采样还是使用指针 models.py:72-74
这种机制使模型能够处理结构化输出中的依赖关系和引用关系 models.py:140-188 。
6. 训练和推理
- 训练阶段:使用teacher forcing,同时计算词汇表损失和指针损失 models.py:190-233
def train_step(self, batch):"""Pass batch through plank model and get log probabilities under model."""inputs = {key:value for key, value in batch.items() if key[:5]=='input'}input_mask = batch['input_mask']output_value = batch['output_value']output_label = batch['output_label']output_mask = batch['output_mask']# embed inputinput_embeds = self._embed_input(inputs)# embed outputoutput_embeds = self._embed_output(output_value[:, :-1])memory = self.encoder(input_embeds, src_key_padding_mask=input_mask)# tgt masktgt_mask = self._generate_square_subsequent_mask(output_embeds.size(1)).to(input_embeds.device)# pass through decoderhiddens = self.decoder(output_embeds, memory, tgt_mask=tgt_mask,tgt_key_padding_mask=output_mask,memory_key_padding_mask=input_mask)# create categorical distributiondists = self._create_dist(hiddens)logits = dists.transpose(1, 2)loss = F.nll_loss(logits, output_label, ignore_index=self.token.PAD)predict = torch.argmax(logits, dim=1)valid = output_label != self.token.PADcorrect = (valid * (predict == output_label)).sum()accuracy = float(correct) / (valid.sum() + 1e-10)rets = {}rets['loss'] = lossrets['accuracy'] = accuracyreturn rets- 推理阶段:采用自回归生成,逐步构建输出序列直到遇到结束标记 models.py:267-323
def eval_step(self, batch):"""Autoregressive sampling."""inputs = {key:value for key, value in batch.items() if key[:5]=='input'}input_mask = inputs['input_mask']# embed inputsinput_embeds = self._embed_input(inputs)batch_size = len(input_embeds)device = input_embeds.devicememory = self.encoder(input_embeds, src_key_padding_mask=input_mask)output = torch.empty((batch_size, 0), dtype=torch.long, device=device)attach = torch.empty((batch_size, 0), dtype=torch.long, device=device)for _ in range(self.max_output_length):# embed decoder inputsoutput_embeds = self._embed_output(output)# tgt masktgt_mask = self._generate_square_subsequent_mask(output.size(1)+1).to(device)# pass through decoderhiddens = self.decoder(output_embeds, memory, tgt_mask=tgt_mask,memory_key_padding_mask=input_mask)# create categorical distributiondists = self._create_dist(hiddens)# sample from the distributionnext_output, next_attach = self._sample(dists, output)# update samplesoutput = torch.concat((output, next_output), dim=1)attach = torch.concat((attach, next_attach), dim=1)if torch.all(torch.any(output == self.token.END, dim=1)):breakpredicts, groundtruths = [], []for i in range(batch_size):predict = self.parse_sequence(output[i])groundtruth = self.parse_sequence(batch['output_value'][i])predicts.append(predict)groundtruths.append(groundtruth)rets = {}rets['samples'] = outputrets['attach'] = attachrets['predicts'] = predictsrets['groundtruths'] = groundtruthsreturn rets技术特点
- 鲁棒性:支持噪声输入和不完整的线条信息
- 结构化输出:直接生成可执行的3D形状程序而非点云或网格
- 多视图融合:有效整合来自三个正交视图的信息
- 端到端学习:从原始线条到3D形状程序的直接映射
Notes
PlankAssembly项目代表了将传统工程制图与现代深度学习技术结合的创新尝试。通过将3D重建问题转化为序列生成问题,并引入指针网络机制处理结构化约束,该方法在工程图纸理解方面取得了显著进展。项目还有后续工作CAD2Program,进一步探索了视觉Transformer在工程图纸理解中的应用
您询问的是PlankAssembly系统的输入数据和输出数据格式。基于代码分析,我来详细说明这个3D重建系统的数据流。
输入数据
PlankAssembly系统支持三种输入数据类型,都是从三视图工程图转换而来:
1. 完整线条数据 (Complete Lines)
包含可见线和隐藏线的完整工程图 README.md:85-86
2. 可见线条数据 (Visible Lines)
仅包含可见边缘的工程图 README.md:89-90
3. 侧面多边形数据 (Sideface Data)
提取的面多边形数据
输入数据的具体格式在LineDataset中处理,包含:
- 线条坐标 (
lines): 线段的边界框坐标 - 视图信息 (
views): 标识线条属于哪个视图(正视图、俯视图、侧视图) - 类型信息 (
types): 线条的类型标识 line_data.py:121-123
输出数据
系统输出3D形状程序,包含两个主要组件:
1. 3D几何坐标 (Planks)
表示3D模型中每个木板的几何参数,包含6个值(位置和尺寸信息) line_data.py:125
2. 连接信息 (Attach)
描述木板之间的连接关系和约束 line_data.py:126
输出序列经过量化处理并添加特殊标记:
- 添加停止标记 (
END token) - 添加填充标记 (
PAD token) - 生成对应的标签和掩码 line_data.py:87-107
数据处理流程
整个数据流程如下:
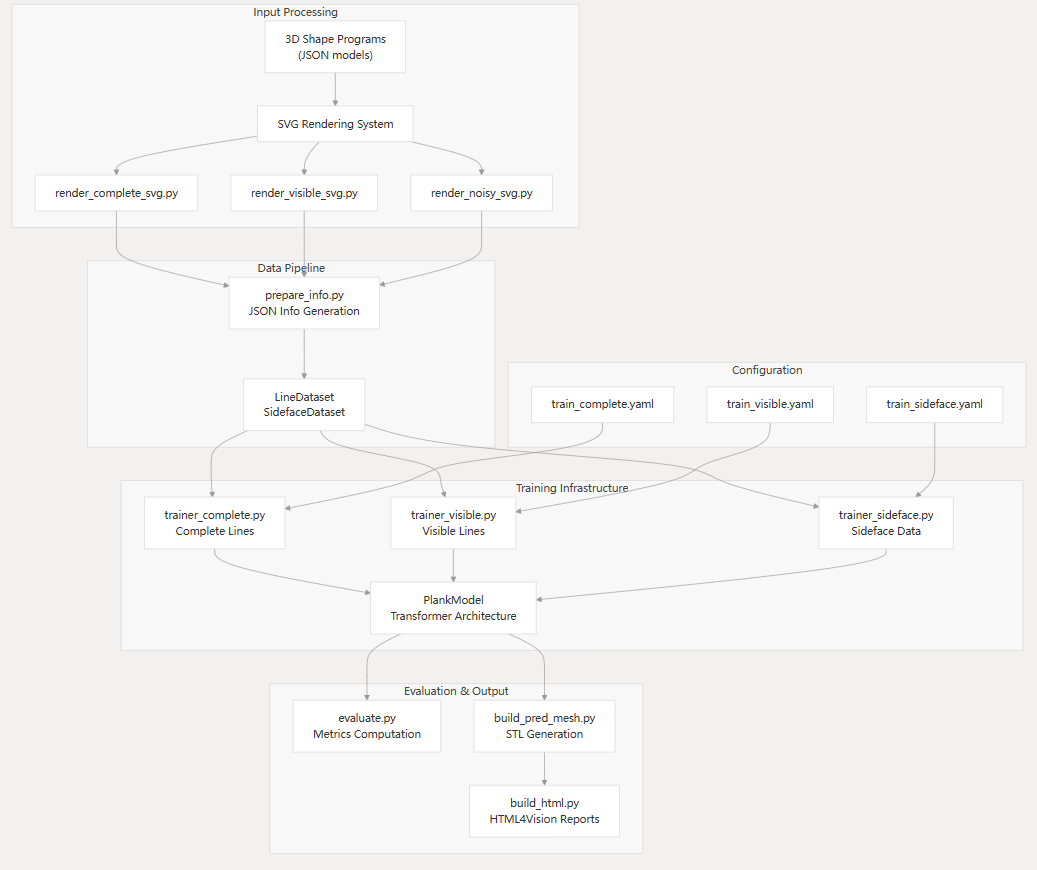
- 3D形状程序 (JSON格式) → SVG渲染 → 三视图SVG文件
- SVG文件 + 形状程序 → JSON信息文件 (通过
prepare_info.py) - 训练时: JSON信息文件 → 序列化输入/输出 → 模型训练 README.md:93-97
Notes
系统使用PythonOCC进行三视图正交工程图渲染 README.md:82 ,支持噪声注入进行数据增强 README.md:87-88 。输出的3D形状程序可以进一步转换为STL网格文件用于可视化。
您询问的是关于PlankAssembly系统中SVG渲染系统的数据处理流程。SVG不是像素数据,而是矢量图形格式,用于表示3D模型的正交工程图。
SVG渲染系统概述
PlankAssembly使用SVG(可缩放矢量图形)格式来表示从3D模型生成的三视图工程图。这些SVG文件包含线条几何信息,而不是像素数据。 README.md:82
数据处理流程
1. SVG渲染脚本
系统提供三种不同的SVG渲染脚本来处理原始3D模型:
render_complete_svg.py- 渲染完整输入(可见线和隐藏线) README.md:85-86render_visible_svg.py- 仅渲染可见线 README.md:89-90render_noisy_svg.py- 渲染带噪声的输入 README.md:87-88
2. SVG数据结构
生成的SVG文件以GeoJSON格式存储线条几何信息,包含:
- 线条坐标边界框 [x_min, y_min, x_max, y_max]
- 视图索引(0=正视图,1=俯视图,2=侧视图)
- 线条类型分类 line_data.py:119-123
3. 数据打包
使用prepare_info.py将SVG文件和形状程序打包成JSON格式: README.md:96
SVG vs 像素数据
SVG是矢量格式,存储的是几何线条信息,具有以下特点:
- 可无限缩放而不失真
- 存储线条的数学描述而非像素点
- 适合工程图的精确表示
这与像素/栅格图像完全不同,后者存储固定分辨率的像素阵列。
Notes 注释
PlankAssembly系统专门设计用于处理矢量化的工程图,因为这种格式能够精确表示3D模型的几何特征。系统还支持栅格图像输入,但需要切换到不同的分支(raster branch)。
{"name": "MH2AYXIKTEMTEAABAAAAAAA8_2","id": "bcfce7f1-61c7-11ed-8fb6-5a377d2e67eb","planks": [[-1050.0000732051035,-290.0,-1000.0000006588434,1050.0000732051035,290.0,1000.0000006588434],[-1050.0000732051035,-290.0,-999.9999993411515,-1031.9999267948967,290.0,999.9999993411516],[1011.9999267948965,-270.0,-999.9999993411515,1030.0000732051035,290.0,999.9999993411516],[-1031.99995613098,-270.0,982.0,1012.0000438690199,290.0,1000.0],[1031.9999267948965,-290.0,-999.9999993411515,1050.0000732051035,-230.0,999.9999993411516]],"normal": [[0.0,0.0,1.0],[-1.0,0.0,-0.0],[-1.0,0.0,-0.0],[0.0,0.0,1.0],[-1.0,0.0,-0.0]],"attach": [[-1,-1,-1,-1,-1,-1],[0,1,2,-1,4,5],[-1,-1,2,-1,4,5],[9,-1,-1,12,4,5],[-1,1,2,3,-1,5]]
}这是PlankAssembly系统中的3D形状程序(shape program)数据格式,用于表示由多个木板(planks)组成的3D模型。
数据结构解析
这个JSON文件包含了一个3D模型的完整描述:
基本信息
name: 模型的唯一标识符 "MH2AYXIKTEMTEAABAAAAAAA8_2"id: 数据库ID "bcfce7f1-61c7-11ed-8fb6-5a377d2e67eb"
planks 数组
每个木板用6个浮点数表示边界框坐标 [x_min, y_min, z_min, x_max, y_max, z_max]:
- 第1个木板: 大型底板,从(-1050, -290, -1000)到(1050, 290, 1000)
- 第2-5个木板: 较小的连接板和支撑板 line_data.py:125-126
normal 数组 标准数组
每个木板的法向量,表示木板的朝向:
[0, 0, 1]: Z轴正方向(水平放置)[-1, 0, 0]: X轴负方向(垂直放置)
attach 数组 附加数组
这是关键的连接信息,用于transformer模型的指针机制。每个木板有6个连接点,值表示:
-1: 无连接- 数字: 连接到其他木板的特定坐标索引 line_data.py:98-101
在训练流程中的作用
这种数据格式在PlankAssembly系统中的处理流程:
-
输入准备:
planks数组被展平并量化为离散token line_data.py:87 -
指针机制:
attach数组用于创建标签,指针索引会加上词汇表大小的偏移 line_data.py:100 -
模型训练: transformer模型学习从2D工程图重建这种3D形状程序
数据特点
- 精确性: 使用浮点坐标确保几何精度
- 结构化: 标准化的6D边界框表示
- 连接性: attach数组编码了木板间的装配关系
- 可扩展: 支持任意数量的木板组合
Notes 注释
这是PlankAssembly系统的核心数据表示,与SVG渲染的2D线条数据形成输入-输出对。系统的目标是从2D工程图学习重建这种结构化的3D表示。每个数值的精度反映了工程制造的要求。
您询问的是PlankAssembly系统中attach数组里的数字12的含义。
attach数组中的指针索引
在您提供的例子中,[9, -1, -1, 12, 4, 5]是第4个木板的attach数组。这个数组表示该木板6个连接点的连接状态:
- 位置0: 指向索引9的坐标
- 位置1-2: 无连接(-1)
- 位置3: 指向索引12的坐标
- 位置4-5: 指向索引4和5的坐标
指针机制的工作原理
数字12是一个指针索引,指向展平后的坐标序列中的第12个位置。在训练过程中,这些指针会被转换为模型的标签: line_data.py:100
当attach数组中的值不等于-1时,系统会给这些指针索引加上词汇表大小(vocab_size)的偏移,将其转换为特殊的指针token。
坐标索引的计算
由于每个木板用6个坐标值表示[x_min, y_min, z_min, x_max, y_max, z_max],索引12对应:
- 木板索引: 12 ÷ 6 = 2 (第3个木板)
- 坐标分量: 12 % 6 = 0 (该木板的x_min坐标)
所以数字12指向第3个木板的x_min坐标值,表示当前木板的第4个连接点与第3个木板的左边界相连。
在模型训练中的作用
这种指针机制让transformer模型能够学习木板之间的装配关系: line_data.py:98-101
模型通过这些指针标签学会在生成3D形状程序时正确建立木板间的连接关系。
Notes 注释
这是PlankAssembly系统核心的指针机制,使模型能够处理结构化的3D装配任务。每个非-1的数值都代表一个具体的几何连接点,12只是其中一个指向特定坐标的索引。
您询问的是PlankAssembly系统中连接指针(attach指针)机制的作用和必要性。
连接指针的核心作用
连接指针机制是PlankAssembly系统解决结构化3D重建问题的关键创新。它让transformer模型能够学习和生成具有正确装配关系的3D形状程序。
为什么需要指针机制
1. 解决装配约束问题
在3D木板装配中,木板之间必须有精确的连接关系。传统的序列生成无法表达这种几何约束,而指针机制通过直接引用坐标索引来建立连接: line_data.py:100-101
当attach数组中的值不等于-1时,系统给指针索引加上vocab_size偏移,将其转换为特殊的指针token,使模型能够区分普通坐标token和连接指针。
2. 实现精确的几何连接
指针机制让模型能够精确指定木板间的连接点。例如,索引12指向第3个木板的x_min坐标,表示当前木板与该坐标位置相连。这种精确性对于生成可制造的3D模型至关重要。
3. 支持复杂装配结构
通过指针机制,模型可以处理任意复杂的装配关系:
- 一个木板可以连接到多个其他木板
- 连接可以指向任意坐标分量(x_min, y_min, z_min, x_max, y_max, z_max)
- 支持层次化的装配结构
在训练和推理中的作用
训练阶段line_data.py:98-101
模型学习预测正确的指针索引,建立输入2D线条与输出3D装配关系的映射。
推理阶段trainer_complete.py:97-106
模型生成的指针信息被用于构建最终的3D形状程序,确保木板间的连接关系正确。
与传统方法的对比
如果没有指针机制,模型只能生成独立的木板坐标,无法表达装配约束。指针机制使PlankAssembly能够:
- 保证几何一致性 - 连接的木板在指定位置必须对齐
- 支持结构化输出 - 生成的不是简单的坐标列表,而是带有装配关系的结构化程序
- 实现端到端学习 - 从2D工程图直接学习到3D装配关系
Notes 注释
这种指针机制是PlankAssembly系统的核心创新,使其能够处理结构化的3D重建任务。它将传统的序列到序列问题转化为带有结构约束的生成问题,这对于工程应用中的精确装配至关重要。
在PlankAssembly的PlankModel中,输入数据经过embedding后会被转换为多维特征表示。
Embedding组件结构
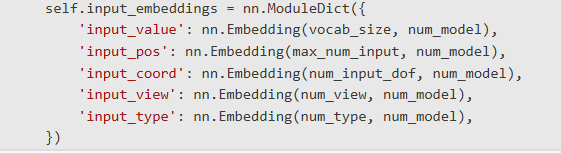
模型使用多模态embedding系统,包含5个不同的embedding层: models.py:47-53
每个embedding层的作用: 每个 embed
input_value: 量化后的坐标值embeddinginput_pos: 序列位置embeddinginput_coord: 坐标类型embedding (x/y坐标标识)input_view: 视图embedding (正视图/俯视图/侧视图)input_type: 线条类型embedding (可见线/隐藏线)
输入数据预处理
在LineDataset中,原始线条数据被处理成embedding所需的格式: line_data.py:34-83
处理步骤包括:
- 坐标量化为离散token
- 按视图和坐标排序
- 添加位置、坐标类型、视图、线条类型标识
- 添加END和PAD token进行填充
Embedding后的格式
经过embedding处理后,每个输入token被转换为num_model维度(默认512维)的向量表示。最终的输入格式是一个字典:
inputs = { 'input_value': [batch_size, max_input_length], # 量化坐标值 'input_pos': [batch_size, max_input_length], # 位置索引 'input_coord': [batch_size, max_input_length], # 坐标类型 'input_view': [batch_size, max_input_length], # 视图索引 'input_type': [batch_size, max_input_length], # 线条类型 'input_mask': [batch_size, max_input_length] # 填充掩码 }每个embedding层将对应的索引转换为512维向量,然后这些向量会被相加形成最终的输入表示,送入transformer encoder。
Notes 注释
这种多模态embedding设计让模型能够同时理解坐标值、空间位置、几何类型和视图信息,为从2D线条重建3D结构提供了丰富的特征表示。所有embedding维度都统一为num_model(512),便于后续的transformer处理。
您询问的是PlankAssembly系统中将输入数据转换为512维embedding向量的具体代码实现。
Embedding定义代码
在PlankModel的初始化中,定义了5个embedding层,每个都将离散索引映射到512维向量: models.py:47-53
这里num_model=512是配置参数,定义了embedding的输出维度。

去学embedding了
PlankAssembly系统的输入和输出数据格式不一致,它们代表完全不同的数据类型:
输入数据格式
输入是2D线条数据,经过预处理后包含:
input_value: 量化后的坐标值序列input_pos: 位置索引input_coord: 坐标类型标识input_view: 视图索引(0=正视图,1=俯视图,2=侧视图)input_type: 线条类型(可见线/隐藏线)
输出数据格式
输出是3D形状程序,包含:
output_value: 量化后的3D边界框坐标序列output_label: 带指针机制的标签序列output_mask: 填充掩码 sideface_data.py:207-213
关键差异
- 数据维度不同: 输入是2D线条(4维坐标),输出是3D边界框(6维坐标)
- 语义不同: 输入表示工程图线条,输出表示3D木板装配
- 结构不同: 输出包含指针机制用于表达装配关系,输入没有
您询问的是PlankAssembly系统中2D线条输入数据的具体格式。让我通过代码示例来说明这种格式。
2D线条数据的原始格式
在PlankAssembly中,输入的2D线条数据来自SVG渲染的工程图。每条线由4个坐标值表示:[x_min, y_min, x_max, y_max],加上视图信息和线条类型。
数据预处理示例
在 中,可以看到输入序列的准备过程:
原始线条数据经过以下处理:
- 坐标量化: 浮点坐标被转换为离散token
- 视图分类: 每条线标记属于哪个视图(0=正视图,1=俯视图,2=侧视图)
- 类型标识: 标记线条类型(可见线/隐藏线)
具体的数据格式示例
处理后的输入数据格式如下:
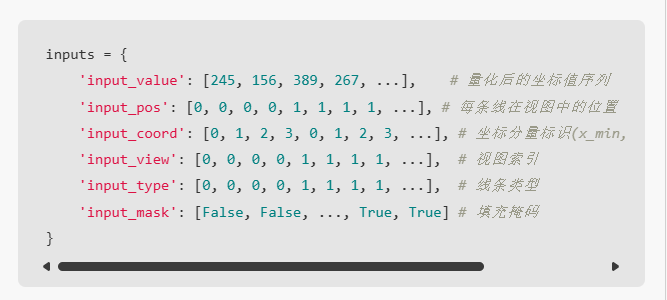
数据加载和使用
在训练器中,这些数据通过 trainer_complete.py:37-38 的LineDataset加载,然后送入模型进行处理。
每个token代表一个坐标分量,4个连续的token组成一条完整的2D线条。通过多模态embedding,这些离散的索引被转换为512维向量表示,供transformer模型处理。
Notes 注释
这种格式设计使得模型能够同时理解几何坐标、空间位置、视图信息和线条属性,为从2D工程图重建3D结构提供了丰富的输入表示。
您询问的是PlankAssembly系统中什么时候需要添加填充掩码(padding mask)。
填充掩码的添加时机
在PlankAssembly系统中,填充掩码在以下几个关键时刻被添加:
1. 数据预处理阶段
在LineDataset和SidefaceDataset的数据预处理过程中,当序列长度不足最大长度时需要添加填充: line_data.py:67-72 sideface_data.py:173-177
这里在添加PAD token后立即生成对应的掩码。
2. 输出序列准备时
在准备输出序列时也需要添加填充掩码: line_data.py:94-95 sideface_data.py:198-199
3. Transformer模型推理时
在模型的前向传播过程中,填充掩码被传递给transformer的encoder和decoder: models.py:206 models.py:212-214
4. 特殊情况检测
在SidefaceTrainer中,填充掩码用于检测是否有有效数据: trainer_sideface.py:61-65
添加填充掩码的原因
- 批处理需求: 不同样本的序列长度不同,需要填充到统一长度
- Attention机制: 防止模型关注无意义的填充位置
- 计算效率: 避免在填充位置进行不必要的计算
- 数据验证: 检测输入序列的有效性
Notes
填充掩码是在序列被填充到固定长度时自动生成的,这是transformer模型处理变长序列的标准做法。在PlankAssembly中,每当有PAD token被添加时,就需要相应的掩码来标识这些位置。
您询问的是PlankAssembly系统中序列的最大长度限制。
序列长度配置
PlankAssembly系统中的序列长度通过配置文件中的MAX_INPUT_LENGTH和MAX_OUTPUT_LENGTH参数控制,不同的训练模式有不同的最大长度设置:
输入序列最大长度
- Complete模式: 1200 train_complete.yaml:41
- Visible模式: 1000 train_visible.yaml:41
- Sideface模式: 300 train_sideface.yaml:41
输出序列最大长度
所有模式的输出序列最大长度都是128 train_complete.yaml:42
在模型中的使用
这些长度参数在PlankModel初始化时被使用: models.py:26-27
模型会根据这些参数计算最大输入和输出数量: models.py:32-33
长度差异的原因
不同模式的输入长度限制反映了数据复杂度的差异:
- Complete模式(1200): 包含可见线和隐藏线,数据最复杂
- Visible模式(1000): 只包含可见线,数据量中等
- Sideface模式(300): 处理侧面多边形,数据最简单
输出长度统一为128,因为3D形状程序的复杂度相对固定,每个木板用6个坐标表示,128长度足以容纳大多数装配结构。
Notes
这些长度限制是在配置文件中硬编码的,可以根据具体需求调整。较长的序列会消耗更多GPU内存,特别是在transformer的attention计算中,内存使用与序列长度的平方成正比。
您询问的是PlankAssembly系统中输出序列长度128能容纳多少个3D结构(木板)。
输出序列长度与结构数量的关系
在PlankAssembly系统中,输出序列的最大长度设置为128 train_complete.yaml:42 。
由于每个木板(plank)用6个坐标值表示边界框 [x_min, y_min, z_min, x_max, y_max, z_max] models.py:24-25 ,我们可以计算最大木板数量:
128 ÷ 6 = 21.33,即最多可以容纳21个完整的木板结构
模型中的计算逻辑
在PlankModel的初始化中,系统会根据输出长度和坐标维度计算最大输出数量: models.py:32-33
这里max_num_output = math.ceil(max_output_length / num_output_dof),即 math.ceil(128 / 6) = 22个木板位置。
实际使用中的考虑
在训练过程中,系统会验证预测输出的有效性,过滤掉无效的边界框:
然后将结果重塑为6维边界框格式:
结论
128长度的输出序列最多可以表示21-22个木板结构,这个设计足以容纳大多数实际的3D装配场景,因为典型的木制家具或结构通常不会超过20个主要组件。
Notes
这个限制是在配置文件中设定的,可以根据具体需求调整。更长的序列会消耗更多GPU内存,特别是在transformer的attention计算中。
您询问的是PlankAssembly系统中embedding处理后输出的数据格式。
Answer
在PlankAssembly系统中,embedding处理后输出的是高维向量表示,具体维度为num_model(默认512维)。
Input Embedding输出
_embed_input方法将多种输入特征组合成统一的embedding表示: models.py:103-112
该方法将所有输入特征(value、position、coordinate、view、type)的embedding相加,输出形状为(batch_size, sequence_length, num_model)的张量。
Output Embedding输出
_embed_output方法处理输出序列的embedding: models.py:114-138
输出embedding同样是512维向量,包含:
- 值embedding:量化后的坐标值
- 坐标embedding:表示当前处理的是x/y/z坐标还是长宽高
- 位置embedding:表示当前处理的是第几个3D边界框
Transformer处理后的数据
经过encoder处理后,embedding数据被转换为memory表示: models.py:206
经过decoder处理后,得到hidden states: models.py:212-214
这些hidden states随后被用于生成最终的预测分布。
最终输出数据
在训练阶段,embedding最终转换为概率分布用于损失计算: models.py:217-221
在推理阶段,通过自回归采样生成3D边界框序列: models.py:309-315
Notes
embedding的核心作用是将离散的输入token转换为连续的向量表示,使transformer能够处理和学习2D线条图到3D边界框的映射关系。所有embedding都是512维向量,这是模型的隐藏维度大小。
您询问的是如果PlankAssembly系统中没有embedding会发生什么。
Answer
如果PlankAssembly系统中没有embedding层,模型将无法正常工作,因为transformer架构完全依赖于embedding来处理输入数据。
Embedding的必要性
在PlankModel中,embedding是数据处理的第一步。 models.py:47-53
没有embedding层,系统将面临以下问题:
1. 无法处理离散输入
原始输入是离散的token ID(量化后的坐标值、位置索引等),transformer需要连续的向量表示才能进行计算。 models.py:103-112
2. 失去位置和语义信息
embedding不仅转换数据格式,还编码了重要的语义信息:
- 坐标维度信息(x/y/z坐标vs长宽高)
- 视图类型信息(前视图/顶视图/侧视图)
- 序列位置信息
3. Transformer无法运行
Encoder和decoder都期望接收embedding后的向量作为输入。 models.py:279
没有embedding,这些组件将无法处理原始的整数token。
4. 训练过程中断
训练步骤依赖于模型的正常前向传播。 trainer_complete.py:63-71
没有embedding,模型无法产生有效的loss和accuracy指标。
Notes
Embedding在PlankAssembly中不是可选组件,而是核心架构的基础部分。它将离散的2D线条图特征转换为transformer可以处理的连续向量空间,使得从2D到3D的映射学习成为可能。移除embedding等同于破坏了整个模型架构。




)
)













