汽车安全 2030 预测 (功能安全FuSa、预期功能安全SOTIF、网络安全CyberSecurity):成本、效益与行业影响
到 2030 年,汽车行业将迎来一场安全技术的深度变革,其中 “三重安全防护”(功能安全 FuSa、预期功能安全 SOTIF、网络安全)备受瞩目。据预测,“三重安全防护” 将占整车 BOM 成本的 12%,同时有望降低 39% 的交通事故率。这一预测背后,隐藏着技术与安全的平衡逻辑,以下将从成本构成、安全效益、技术协同及行业影响四维度展开详细分析:
📊 一、成本结构解析:12%的BOM成本从何而来?
三重安全防护的成本主要由硬件、软件及验证体系三部分构成,覆盖整车全生命周期:
- 硬件成本(占比7%-8%)
-
传感器冗余系统 :激光雷达价格约 500 美元 / 个,毫米波雷达约 100 美元 / 个,高精度摄像头约 50 美元 / 个。以 L4 级车型为例,需配置 11-15 个传感器。比如,一款高端自动驾驶车型,配置 12 个传感器,仅传感器成本就达 4800 - 6600 美元。
-
安全芯片与控制器 :满足 ASIL-D 等级的域控制器价格约 200 美元 / 个,HSM 硬件安全模块约 30 美元 / 个。
-
电池防护结构 :针对新能源汽车的强化侧碰防护框架,增加成本约 2000 元 / 车。随着新能源汽车的普及,电池安全备受关注,强化的电池防护结构能有效降低碰撞时电池起火、爆炸等风险。
-
下图展示了不同级别车型传感器配置数量与成本的大致关系:
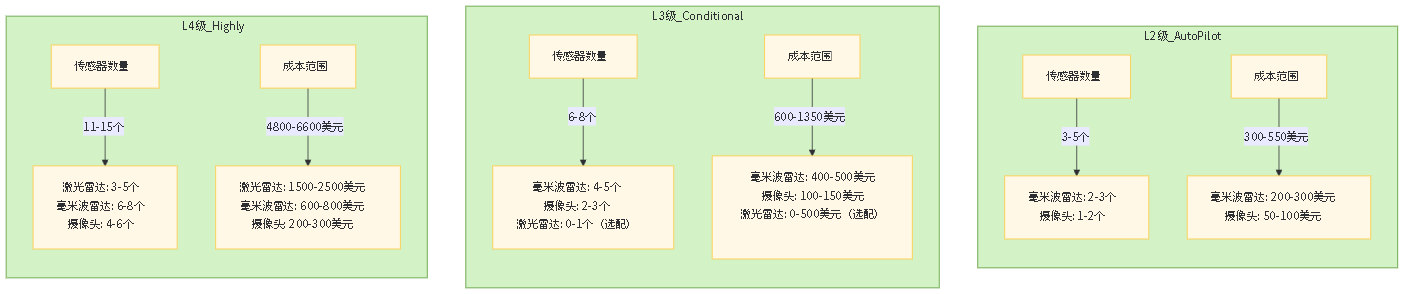
数据说明
- 传感器单价:
- 激光雷达:500美元/个(L4级车型配置为主)
- 毫米波雷达:100美元/个(全级别通用)
- 高精度摄像头:50美元/个(全级别通用)
- L2/L3级车型传感器类型占比:
- 以毫米波雷达+摄像头为主(激光雷达仅高端L3车型选配)
- L4级车型典型配置(如Robotaxi):
- 激光雷达:3-5个
- 毫米波雷达:6-8个
- 摄像头:4-6个
关键对比维度
| 车型级别 | 核心传感器差异 | 成本驱动因素 | 典型配置案例 |
|---|---|---|---|
| L2级 | 无激光雷达,依赖毫米波雷达+摄像头 | 传感器数量少,单价低 | 特斯拉Autopilot(8摄像头,无激光雷达) |
| L3级 | 可选配激光雷达(如奥迪A8) | 激光雷达选配导致成本波动大 | 奔驰DRIVE PILOT(1激光雷达+多摄像头) |
| L4级 | 多激光雷达+大量毫米波雷达/摄像头 | 激光雷达占比超30%,单价占总成本60%以上 | Waymo Robotaxi(5激光雷达+29摄像头) |
-
软件与算法(占比 3%-4%) :
- AI 模型开发 :SOTIF 场景生成算法、网络入侵检测模型开发成本超 500 万 / 车型。开发一款先进的 SOTIF 场景生成算法,需要耗费大量的人力、物力进行数据采集、标注和模型训练,以确保算法能够准确地预测各种复杂交通场景下的潜在风险。
- OTA 安全认证 :端云协同加密通信系统占车联网模块成本 15%。为了保障车辆 OTA 升级过程中的信息安全,需要建立可靠的加密通信体系,防止黑客攻击和数据泄露。
-
验证与认证(占比 1%-2%) :
- 仿真测试平台 :每日百万公里级虚拟测试,如奔驰的 SOTIF 平台,通过高精度的仿真模型和复杂的测试场景,对车辆的安全性能进行全面评估,确保车辆在各种极端工况下的安全性。
- 实车碰撞升级 :满足新国标侧面碰撞测试,成本增加约 1200 元 / 车。新的碰撞测试标准更加严格,对车辆的车身结构、安全气囊等安全装置提出了更高的要求,促使车企加大在碰撞测试方面的投入。
表:三重安全防护成本分项占比(2030年预测)
| 成本类别 | 占BOM成本比例 | 典型组件 | 成本驱动因素 |
|---|---|---|---|
| 硬件系统 | 7%-8% | 激光雷达、HSM芯片、电池防护结构 | 传感器冗余、芯片算力提升 |
| 软件算法 | 3%-4% | SOTIF场景引擎、AEB控制算法 | AI训练数据量、OTA复杂度 |
| 验证体系 | 1%-2% | 仿真平台授权、碰撞测试认证 | 法规升级、测试里程要求 |
| 数据来源:行业成本模型分析 |
⚙️ 二、安全效益机制:39%事故率下降如何实现?
三重防护通过分层拦截风险,覆盖事故链各环节。
-
主动安全层(降低 25% 事故) :
-
AEB 系统升级 :新国标要求 60km/h 避撞静止车辆,实际高阶系统(如佑驾创新 iPilot)已支持 130km/h 刹停。

-
多传感器融合 :毫米波雷达穿透雨雾 + 摄像头语义识别,误触发率降至 0.1 次 / 万公里。在恶劣天气条件下,多传感器融合的优势尤为明显,能够有效提高车辆对周围环境的感知准确性,减少误判和漏判。
-
-
被动安全层(降低 10% 事故) :
- 碰撞标准提升 :2025 版侧碰标准将壁障重量从 950kg 增至 1400kg,模拟真实车重分布,骨盆伤害指标要求提高 40%。更高的碰撞标准促使车企优化车辆的车身结构设计,提升乘员保护性能。
- 电池安全设计 :碰撞后 30 分钟内电池零起火(如比亚迪 CTB 技术)。比亚迪的 CTB 电池车身一体化技术,将电池与车身结构紧密结合,提高了电池在碰撞中的安全性,有效防止电池起火、爆炸等危险情况的发生。
-
网络安全层(降低 4% 事故) :
- 实时入侵检测 :CAN 总线指纹技术识别假冒节点(>99.2% 准确率)。通过监测车辆网络中的数据流量和节点行为,及时发现并阻止潜在的网络攻击,保障车辆的行驶安全。
- OTA 安全加固 :防止恶意固件篡改刹车指令(如特斯拉 2024 年阻截率 98.7%)。特斯拉通过完善的 OTA 安全机制,对车辆的软件更新进行严格的安全检查和验证,确保车辆在接收和安装软件更新时的安全性。
案例 :搭载全栈三重安全的车型(如蔚来 ET7),在 C-NCAP 2024 测试中行人保护得分率 91%,较未搭载车型高 23%。这一案例充分展示了三重安全防护在提升车辆安全性方面的显著效果,蔚来 ET7 凭借其先进的安全技术,在保护行人安全方面表现出色,为行业树立了新的标杆。
🔗 三、成本与安全的平衡逻辑
12% 成本投入与 39% 事故下降的 “剪刀差” 源于三重防护的协同效应。
- 技术复用降本 :域控制器同时处理 FuSa 监控、SOTIF 场景预测、网络加密,减少 30% 冗余硬件。域控制器作为车辆的中央计算单元,能够整合多种安全功能,实现硬件资源的共享和优化,从而降低硬件成本。
- 软件定义安全 :OTA 升级使 SOTIF 场景库持续扩充,无需新增传感器即可提升性能。通过 OTA 升级,车辆可以不断接收新的 SOTIF 场景数据和算法优化,提升对复杂交通场景的应对能力,而无需对硬件进行大规模的改动,降低了成本投入。
- 政策杠杆效应 :中国 AEB 新国标强制安装(2026 年实施),推动毫米波雷达规模化降价(2023-2030 年降幅达 60%)。政府政策的推动作用,促使汽车零部件供应商加大研发投入,提高生产规模,从而降低零部件价格,为车企降低了成本,同时也提高了整个行业的安全水平。
图:三重防护协同降低全事故链风险 :
事故前预防 事故中防护 事故后止损│ │ │├─主动安全层─┐ ├─被动安全层─┐ ├─网络安全层─┐│AEB/ESP │ │强化车身 │ │入侵阻断 ││传感器融合 │───▶ │安全气囊 │───▶ │应急解锁 ││(降25%事故)│ │(降10%事故)│ │(降4%事故) │└─────────┘ └─────────┘ └─────────┘
🚀 四、行业影响与挑战
-
市场分化加速 :
- 高端车型 :率先部署激光雷达 + 千 TOPS 算力(成本占比 15%-18%)。高端汽车品牌为了在市场竞争中脱颖而出,不断提升车辆的安全性能和科技含量,投入大量资源研发和应用先进的安全技术,如激光雷达和高性能芯片,以提供更高级别的自动驾驶辅助功能和更全面的安全保护。
- 经济车型 :依赖 1V3R(1 摄像头 + 3 雷达)方案,成本占比压至 8%-10%。经济型汽车则更注重成本控制,在满足基本安全法规要求的基础上,采用相对简单但有效的传感器配置方案,以实现一定的安全性能提升,同时保持价格的竞争力。
-
技术融合难点 :
- 实时性冲突 :加密算法增加网络延迟(如 AES-256 延时 5ms),影响刹车响应。在车辆的网络安全防护中,加密算法虽然能够提高数据的安全性,但也会增加网络传输的延迟,这对于车辆的制动系统等对实时性要求极高的功能来说,可能会产生一定的影响,需要在安全和性能之间找到平衡。
- 场景覆盖缺口 :极端天气 SOTIF 验证需千亿公里仿真,算力成本高昂。为了确保车辆在各种极端天气条件下的安全性能,需要进行大量的仿真测试,但目前的算力水平和测试成本限制了仿真测试的规模和范围,导致部分极端场景的验证存在缺口,给车辆的安全性带来了潜在风险。
-
政策与标准驱动 :
- 联合国 R155/R156 强制网络安全认证(2024 年覆盖欧盟 / 中国) :这些国际标准的实施,推动了全球汽车网络安全技术的发展和应用,促使车企加强车辆网络安全防护能力,提高整个行业的网络安全水平。
- C-NCAP 2024 将 AEB 纳入五星评级必备项 :通过将 AEB 系统纳入五星评级的必备条件,激励车企加快 AEB 系统的研发和应用,提高车辆在紧急制动情况下的安全性能,从而提升车辆的整体安全评级,增强市场竞争力。
💎 结论:技术与生命的价值方程式
12% 的 BOM 成本不仅是硬件堆砌,更是覆盖 “感知 - 决策 - 执行 - 救援” 全链路的系统性投资。当 39% 事故下降转化为每年减少超 20 万起伤亡(中国交管局 2030 年预测),其社会经济价值远超成本本身 —— 这正是汽车工业从 “移动工具” 向 “安全伙伴” 进化核心逻辑。随着芯片集成度提升和法规标准化,2030 年后三重防护成本有望降至 8%-10%,进一步普惠大众市场。
参考资料:
https://news.youth.cn/gn/202505/t20250530_16031769.htm
https://www.dongchedi.com/article/7359451799265215027
https://finance.eastmoney.com/a/202505293417545034.html
https://chejiahao.autohome.com.cn/info/15685647



![[Hackers and Painters] 读书笔记 | 设计模式思想 | LISP](http://pic.xiahunao.cn/[Hackers and Painters] 读书笔记 | 设计模式思想 | LISP)






)
)
微服务(grpc/grpc消费者))

)
入门 - (1) 相关概念)


:未命名的命名空间)
