问题:我想把打印姿态传感器的角度,但是重定向的打印函数突然打印不出来。
尝试:我怀疑是优先级的问题,故调整了串口,定时器,dma的优先级
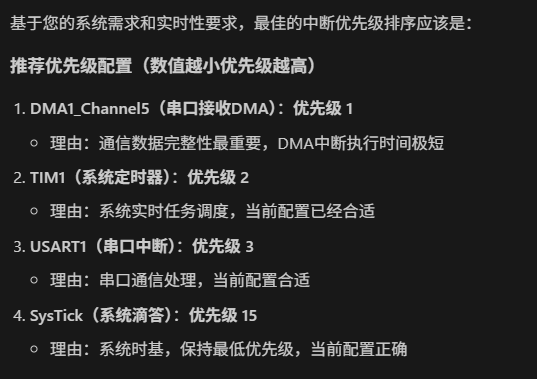
可是发现调了还是没有用,最终发现,我把定时器中的任务屏蔽后可以正常使用了
根本原因是:定时器中断服务程序(ISR)执行时间过长且优先级过高,导致系统被"锁死"在中断中
解决办法:
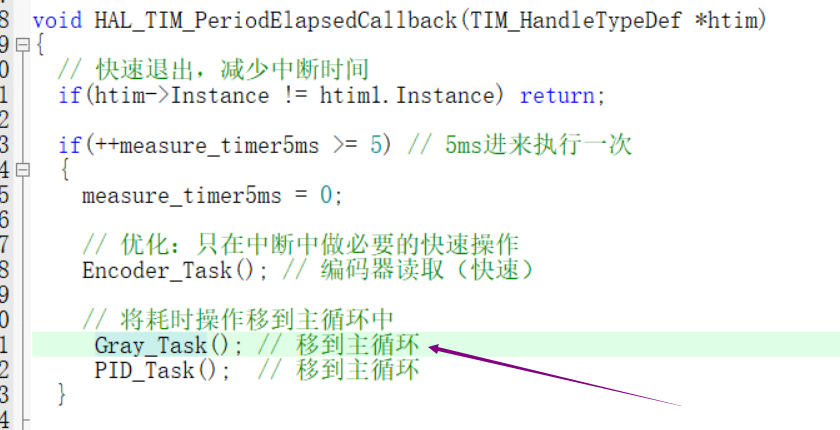
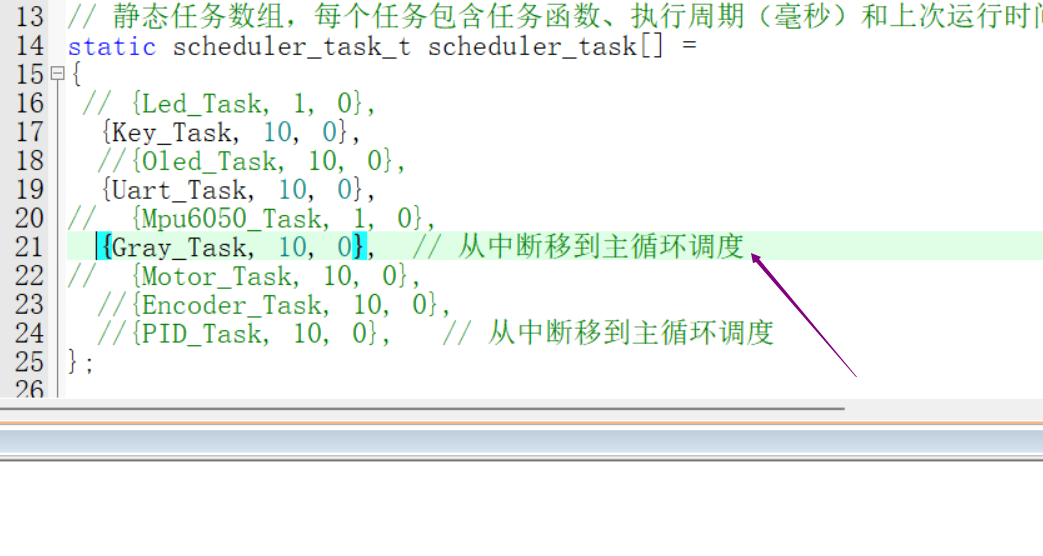
把耗时的任务移到任务调度器或者主循环里即可。
问题:我想把打印姿态传感器的角度,但是重定向的打印函数突然打印不出来。
尝试:我怀疑是优先级的问题,故调整了串口,定时器,dma的优先级
可是发现调了还是没有用,最终发现,我把定时器中的任务屏蔽后可以正常使用了
根本原因是:定时器中断服务程序(ISR)执行时间过长且优先级过高,导致系统被"锁死"在中断中
解决办法:
把耗时的任务移到任务调度器或者主循环里即可。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.pswp.cn/web/89086.shtml 繁体地址,请注明出处:http://hk.pswp.cn/web/89086.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!


)




算法的类cv::img_hash::PHash)

)
宏来判断指针合法性?)





)

