目录
10.1 组合逻辑设计
10.1.1 组合逻辑控制单元框图
10.1.2 微操作的节拍安排
10.1.3 组合逻辑设计步骤
10.2 微程序设计
10.2.1 微程序设计思想的产生
10.2.2 微程序控制单元框图及工作原理
10.2.3 微指令的编码方式
1. 直接编码(水平型)
2. 字段间接编码
10.2.4 微指令序列地址的形成
10.2.5 微指令格式
10.2.6 静态微程序设计和动态微程序设计
10.2.7 毫微程序设计(分级微程序)
10.2.8 串行微程序控制和并行微程序控制
10.2.9 微程序设计举例:ADD 指令执行流程
微指令代码示例(简化版)
📌 总结对比
📚 扩展资源

10.1 组合逻辑设计
组合逻辑控制单元通过硬连线逻辑实现指令操作控制,适用于简单指令系统。其核心是根据当前指令、状态信号和时序信号生成固定的控制信号序列。
10.1.1 组合逻辑控制单元框图
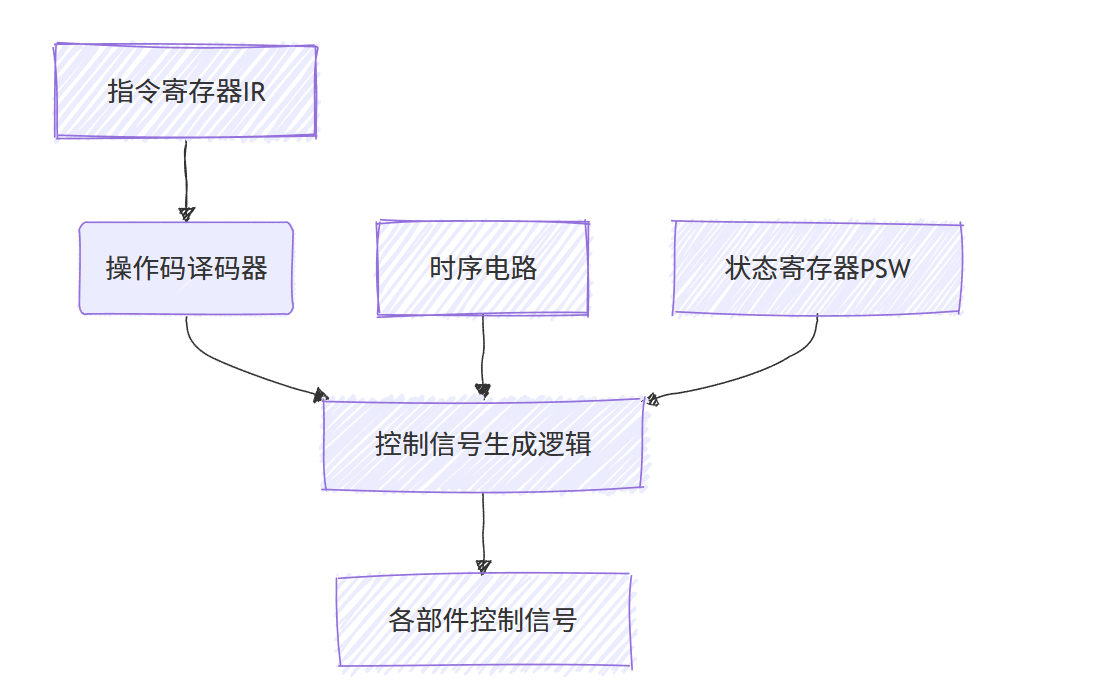
组合逻辑控制单元结构框图
10.1.2 微操作的节拍安排
微操作需按 CPU 周期(机器周期)和节拍电位 / 脉冲进行时序划分。假设采用四节拍模型(T0-T3),示例如下:
// 假设CPU周期为4个节拍,每个节拍处理不同微操作
public class TimingUnit {private int currentCycle; // 当前机器周期private int currentBeat; // 当前节拍(0-3)// 生成节拍信号public void generateBeatSignal() {switch (currentBeat) {case 0: // 节拍1:取指令操作码System.out.println("T0: 从IR中提取操作码");break;case 1: // 节拍2:计算操作数地址System.out.println("T1: 地址计算逻辑工作");break;case 2: // 节拍3:执行数据读写System.out.println("T2: 存储器/IO读写控制");break;case 3: // 节拍4:结果回写与状态更新System.out.println("T3: 运算结果写入寄存器");break;default:throw new IllegalArgumentException("无效节拍");}}
}
10.1.3 组合逻辑设计步骤
- 确定指令集微操作:列出每条指令的微操作序列(如 ADD 指令需取指、取源操作数、运算、存结果)。
- 分配时序节拍:为每个微操作指定执行的节拍(如取指固定在 T0-T1)。
- 逻辑表达式推导:根据微操作与指令码 / 状态 / 节拍的关系,写出控制信号逻辑式(如
ALU_op = (IR_op==ADD) && (T==T2))。 - 电路实现:用门电路、编码器等搭建硬连线逻辑。
10.2 微程序设计
微程序控制将控制逻辑存储为微指令序列,通过读取微程序实现动态控制,灵活性远超组合逻辑。
10.2.1 微程序设计思想的产生
由英国剑桥大学 M.V.Wilkes 提出,核心思想:将每条机器指令拆解为若干微指令,存储在控制存储器中,通过微指令计数器(μPC)顺序执行。
10.2.2 微程序控制单元框图及工作原理
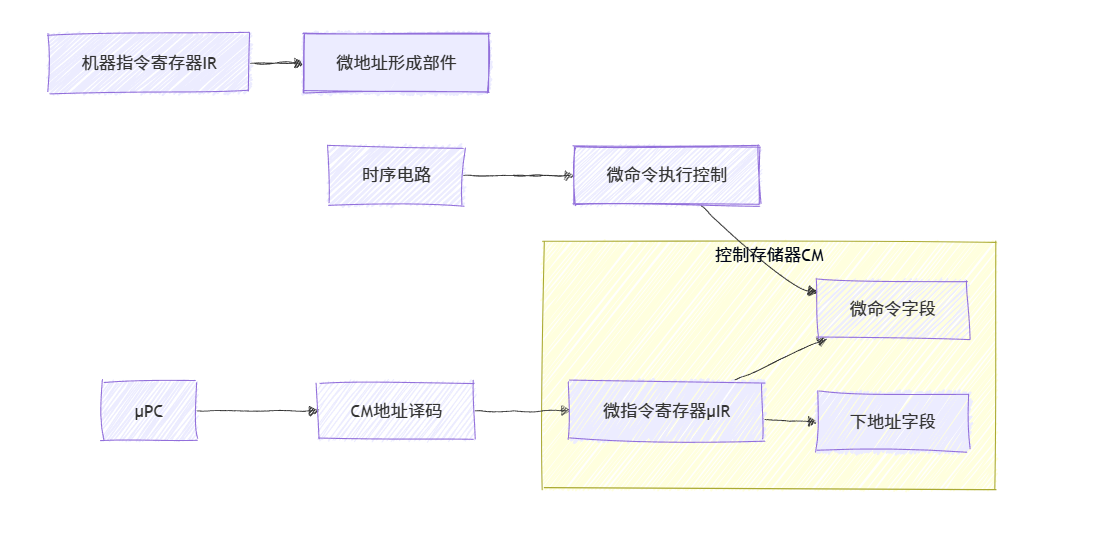
微程序控制单元工作流程
10.2.3 微指令的编码方式
1. 直接编码(水平型)
微命令字段每位独立表示一个控制信号,无需译码,执行速度快但编码长度长。
// 直接编码示例:32位微指令,每位对应一个控制信号
public class DirectEncodingMicroinstruction {private boolean regWrite; // 寄存器写(第0位)private boolean memRead; // 存储器读(第1位)private boolean aluAdd; // ALU加法(第2位)// ... 其他30个控制信号
}
2. 字段间接编码
字段内部分位组合表示微命令,需通过字段译码器解析。
// 字段间接编码示例:3位ALU操作字段(000-111对应8种操作)
public class IndirectEncodingMicroinstruction {private int aluOpCode; // 3位字段,0-7表示加法/减法/逻辑与等private boolean memOp; // 1位存储器操作(读/写)public String getAluOperation() {String[] ops = {"加法", "减法", "逻辑与", "逻辑或", "移位", "比较", "取反", "直通"};return ops[aluOpCode];}
}
10.2.4 微指令序列地址的形成
- 顺序执行:
μPC = μPC + 1 - 条件转移:根据状态标志(如 ZF=1 时跳转)
// 条件转移逻辑示例
public class MicroPC {private int currentAddress;private boolean zf; // 零标志public int nextAddress(boolean isConditional, int targetAddress) {if (isConditional && zf) { // 条件满足时跳转return targetAddress;} else { // 顺序执行或无条件跳转return currentAddress + 1;}}
}
10.2.5 微指令格式
典型格式:
| 微命令字段 | 判别测试字段 | 下地址字段 |
|---|---|---|
| 控制信号输出 | 条件判断依据 | 下条微指令地址 |
10.2.6 静态微程序设计和动态微程序设计
- 静态:微程序固化在 ROM 中,不可修改(如早期 CPU)。
- 动态:微程序存储在可写存储器(如 EEPROM),支持程序运行中修改(如微程序动态加载升级)。
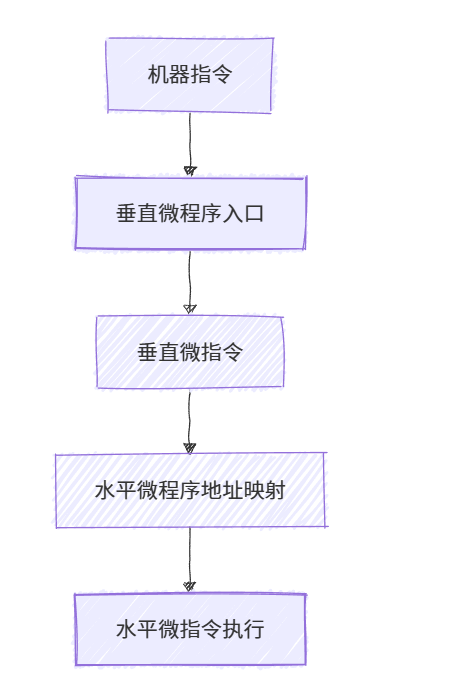
10.2.7 毫微程序设计(分级微程序)
引入两级微程序:
- 垂直型微指令:用于控制基本操作(如寄存器传输)。
- 水平型微指令:用于解析垂直微指令,生成具体控制信号。
10.2.8 串行微程序控制和并行微程序控制
| 类型 | 特点 |
|---|---|
| 串行 | 微指令按顺序执行,下一条微指令需等待前一条完成(控制简单,速度慢)。 |
| 并行 | 允许同时执行多个微操作(如同时读写寄存器和启动 ALU),需复杂时序控制。 |
10.2.9 微程序设计举例:ADD 指令执行流程
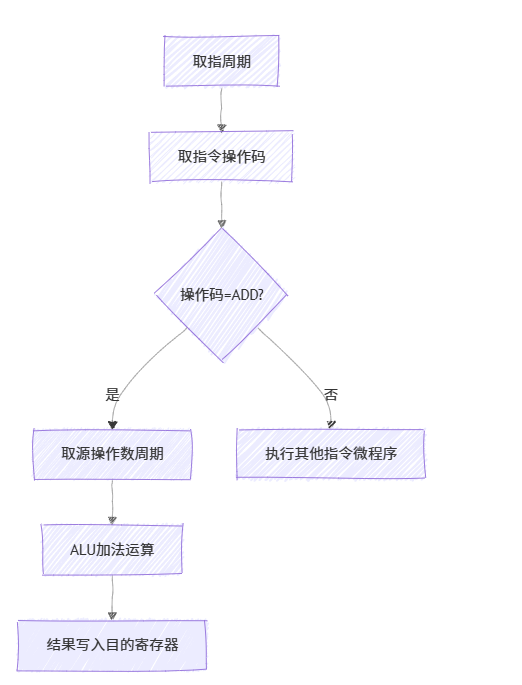
ADD 指令微程序流程图
微指令代码示例(简化版)
// 控制存储器模拟(存储微指令序列)
public class ControlMemory {private Microinstruction[] cmemory;public ControlMemory() {// 初始化ADD指令微程序(假设地址0-3)cmemory = new Microinstruction[4];// 0号微指令:取指令(PC→MAR,读存储器)cmemory[0] = new Microinstruction("regWrite=0, memRead=1, aluOp=0", // 控制信号0, // 无测试条件,顺序执行1 // 下地址1);// 1号微指令:译码(IR→操作码寄存器)cmemory[1] = new Microinstruction("regWrite=1, memRead=0, aluOp=0","opCodeTest", // 测试操作码2 // 操作码为ADD时跳转至2,否则跳转至其他地址);// 2号微指令:取源操作数(R1→ALU)cmemory[2] = new Microinstruction("regRead=R1, aluOp=LOAD_A",0,3);// 3号微指令:执行加法(ALU=ADD,结果→R2)cmemory[3] = new Microinstruction("aluOp=ADD, regWrite=R2",0,0 // 返回取指周期);}
}// 微指令类
class Microinstruction {String controlSignals; // 控制信号字段String testCondition; // 判别测试字段int nextAddress; // 下地址字段public Microinstruction(String ctrl, String test, int nextAddr) {this.controlSignals = ctrl;this.testCondition = test;this.nextAddress = nextAddr;}
}
📌 总结对比
| 设计方法 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 组合逻辑控制 | 速度快、无需存储 | 灵活性差、修改困难 | 简单指令集、高性能 CPU |
| 微程序控制 | 可编程性强、易维护 | 存在取微指令开销 | 复杂指令集、可扩展架构 |
📚 扩展资源
- 推荐教材:《计算机组成原理(第 2 版)》唐朔飞
- 仿真工具:Logisim(组合逻辑设计)、MARS MIPS Simulator(微程序模拟)
如需进一步探讨具体实现细节,欢迎在评论区留言!🚀

简单介绍。)
![[7-1] ADC模数转换器 江协科技学习笔记(14个知识点)](http://pic.xiahunao.cn/[7-1] ADC模数转换器 江协科技学习笔记(14个知识点))





)
)
开机向导配置)

)


,自定义UI)



)