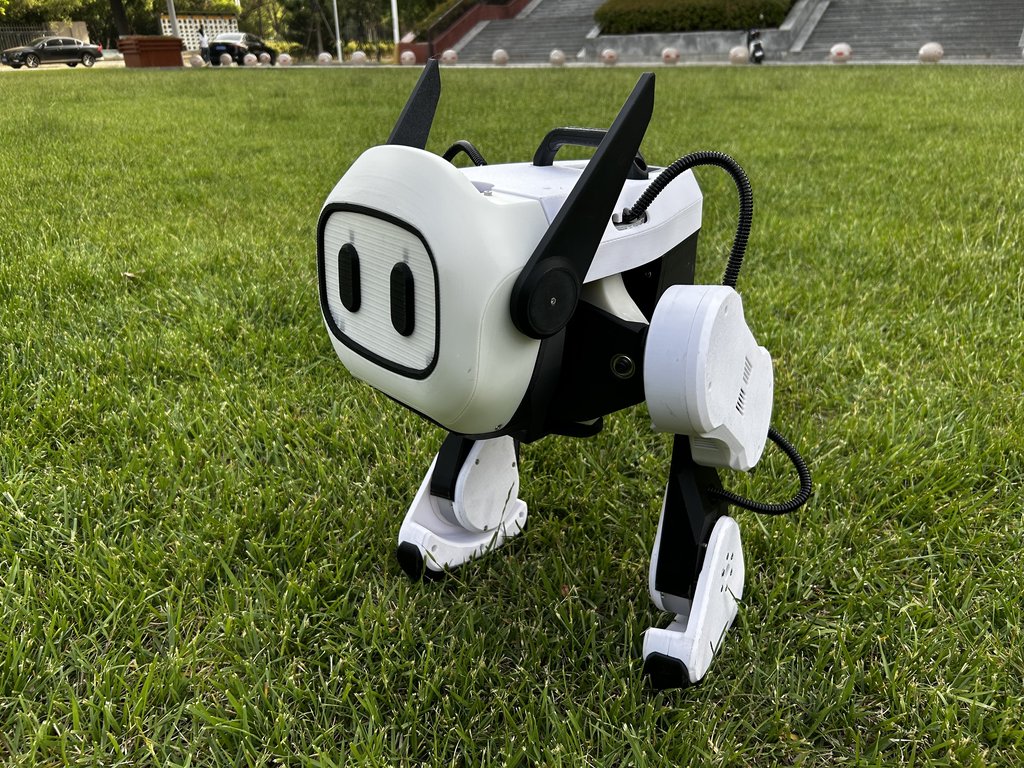
Unitree Qmini 是一款由宇树科技设计并开源的低成本双足机器人,开发者可以完全通过 3D 打印进行复刻。Qmini 专为业余爱好者、教育工作者和研究人员设计,使用户能够快速上手,并以类似乐高的模块化方式组装自己的机器人。该项目为机器人技术提供了一个便捷且经济的切入点,加速创新,并为全球机器人生态系统的发展做出贡献。
Qmini 秉承“优秀工具应该易于使用”的理念,在构建时充分考虑了简洁性和成本效益。因此该平台支持一系列经济实惠的控制板,并以 树莓派(Raspberry Pi 4 Model B)作为默认参考板。开发者可以根据具体需求或项目自由选择其他控制器。
软硬件完全开源
Hardware: 硬件:
- 提供完整的物料清单(BOM)
- 提供电气系统框图
- 提供 DIY 制作说明
机械结构:
- 提供所有机械部件的 STEP 文件
- 提供装配 SOP(标准操作程序)
Software: 软件:
- URDF 模型
- 核心软件堆栈:RoboTamer4Qmini
STEP (或 STP)是一种用于存储和传输三维和二维几何模型、零件和设计数据的文件格式,是计算机辅助制造(CAM)和计算机辅助设计(CAD)软件的常用格式。
URDF(全称 Unified Robot Description Format)是一种用于描述机器人模型和机器人外部环境的 XML 格式文件,在 ROS(机器人操作系统)中广泛使用,比如在 Rviz 可视化工具中显示模型,或者在 Gazebo 仿真环境中进行仿真。
制作说明
得益于全面的开源资源,开发者可以轻松获取所有必需的组件。Qmini 的所有机械结构均可 3D 打印,几乎无需定制加工。机身主体零部件打印参数建议如下表所示。
| 零件 | 材质 | 墙层数 | 顶部壳体层数 | 底部壳体层数 | 稀疏填充密度 | 稀疏填充图案 |
|---|---|---|---|---|---|---|
| 机身顶部主架 | PLA | 4 | 4 | 4 | 20 | 蜂窝 |
| 机体主骨架 | PLA | 5 | 5 | 5 | 20 | 蜂窝 |
| 机体前端风扇安装件 | PLA | 5 | 5 | 5 | 20 | 蜂窝 |
| 电池仓 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |
| 电池底部支撑件 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |
| 腿部 yaw 轴限位块 | PLA | 5 | 5 | 5 | 20 | 蜂窝 |
| 顶部 yaw 轴电机安装座 | PLA | 4 | 4 | 4 | 20 | 蜂窝 |
| 顶部陀螺仪安装座 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |
| 树莓派安装座 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |
打印完成后,使用宇树高可靠性的 8010 电机和标准电池组,仅需 3-5 小时即可完成所有部件的组装。

Qmini 机器人集成了 11 个 Unitree 8010 电机 —— 这是一种经过验证的执行器,可用于各种商业机器人平台。其中:
- 10 个电机驱动机器人的主要运动系统
- 1 个电机 位于机器人颈部,作为定制扩展预留
这种模块化鼓励开发者设计和制作自己的扩展原型,增强 Qmini 机器人的功能、美观性或交互性。
电气连接
Qmini 机器人的电机通讯线由树莓派主板 USB3.0 接口经 Type-A 转 Type-C,接入 485 转接板。
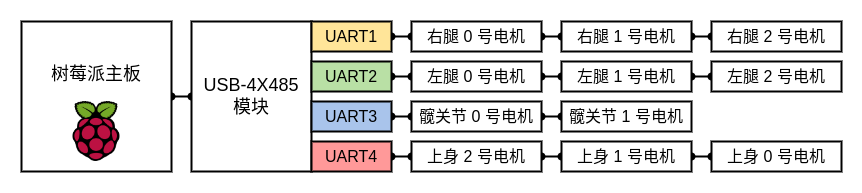
其中:
- 转接板
UART1接出 485A/B 双绞,至右腿 0 号电机,右腿 0 至右腿 1 号电机,右腿 1 至右腿 2 号电机,形成 USB 总线 UART1。 - 转接板
UART2接出 485A/B 双绞,至左腿 0,左腿 0 号电机至左腿 1 号电机,左腿 1 号电机至左腿 2 号电机,形成 USB 总线 UART2。 - 转接板
UART3接出 485A/B 双绞,至髋关节 0 号电机, 髋关节 0 号电机至髋关节 1 号电机,形成 USB 总线 UART3。 - 转接板
UART4接出 485A/B 双绞,至上身 2 号电机; 上身 2 号电机至上 1, 上身 1 号电机至上身 0 号电机,形成 USB 总线 UART4。
另外,开发板散热风扇电源由开发板 GPIO2(正极 5V)和 GPIO14(GND)引脚输出 5V 对外供电。
应用场景
Qmini 适用于多种场景和人群,例如:
- 个人爱好者 —— 在家 3D 打印、组装和编程自己的机器人
- STEM 教育 —— 非常适合机器人竞赛、实验室实验和毕业项目
- 研究机构 —— 用于测试动态步态、运动控制和人工智能算法的紧凑型平台
- 互动娱乐 —— 准备在动画、舞台表演或其他创意科技体验中表演
相关链接
- 宇树科技官网
- Qmini 仓库(GitHub)
- RoboTamer4Qmini 仓库(GitHub)









)
![[论文阅读]TrustRAG: Enhancing Robustness and Trustworthiness in RAG](http://pic.xiahunao.cn/[论文阅读]TrustRAG: Enhancing Robustness and Trustworthiness in RAG)







)
![[Java恶补day22] 240. 搜索二维矩阵Ⅱ](http://pic.xiahunao.cn/[Java恶补day22] 240. 搜索二维矩阵Ⅱ)