随着计算机视觉技术的快速发展,基于图像处理的火灾检测系统在安全监控领域的应用得到了广泛关注。本文提出了一种基于图像处理的火灾检测系统,该系统通过对图像进行预处理、颜色空间转换、阈值化处理和形态学分析,自动检测火灾疑似区域。首先,系统通过中值滤波对输入图像进行噪声去除,提高图像质量;随后,使用颜色空间转换技术将图像从 RGB 色彩空间转换为 CMYK 色彩空间,并提取其中的 M(品红)和 Y(黄色)通道。接着,通过 Otsu 方法对图像进行二值化处理,并利用形态学操作去除边界噪声和无关区域。通过连通域分析,系统能够有效检测火灾疑似区域并标记出火灾位置。实验结果表明,该方法能够在不同环境下有效识别火灾区域,具有较高的准确性和实用性。最后,本文还讨论了该系统在火灾预警中的潜力,并提出了改进方向。
作者:张家梁(自研改进)
引言
随着城市化进程的加速和高层建筑的增多,火灾成为了现代社会中日益严峻的安全隐患。火灾的迅速蔓延和灾难性后果使得火灾早期检测成为了消防安全管理中的一项重要任务。传统的火灾检测方法,如烟雾探测器和温度传感器,虽然在一定程度上能够有效地发出警报,但在实际应用中也存在着局限性,如响应速度慢、适用范围有限等问题。
近年来,计算机视觉和图像处理技术的快速发展为火灾检测提供了新的解决方案。与传统方法相比,图像处理技术能够实时处理监控视频中的图像数据,通过分析图像的颜色、纹理、形状等特征,自动识别火灾迹象。尤其是在高楼大厦、工业场所和森林等难以直接感知火灾的环境中,图像处理技术具有重要的应用价值。
本文基于图像处理技术,设计并实现了一种火灾检测系统。系统首先对输入图像进行预处理,包括中值滤波以减少噪声,然后通过颜色空间转换提取 M 和 Y 通道进行进一步分析。利用 Otsu 二值化算法和形态学处理去除图像中的噪声和干扰区域,最后通过连通域分析提取火灾疑似区域,并通过矩形框标记出火灾位置。
本论文的主要贡献在于提出了一种基于图像处理的火灾检测方法,并在不同的实验场景下对该方法进行了验证。实验结果表明,该方法能够准确、及时地检测火灾区域,并为进一步的火灾预警系统提供了理论基础和实践指导。此外,本文还探讨了该方法在实际应用中的潜力和未来的改进方向。
系统架构
1.系统概述
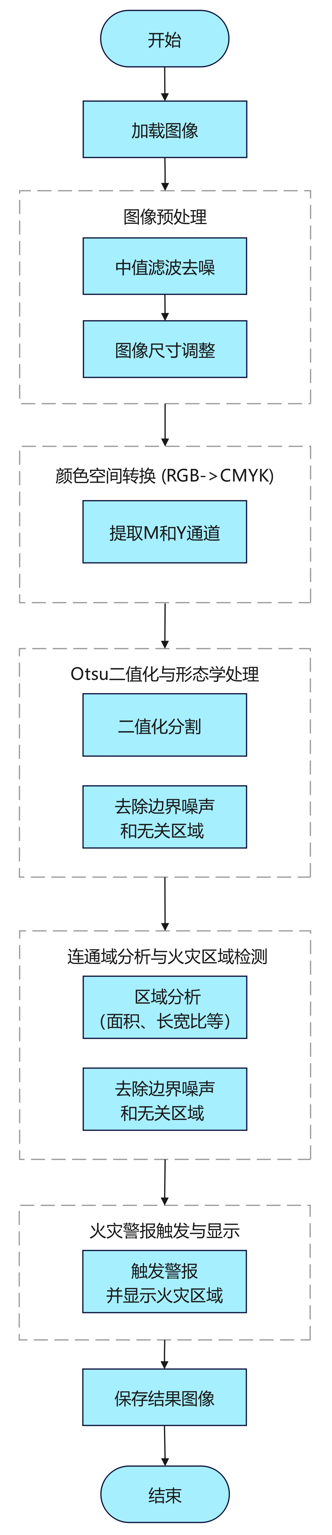
本文提出的火灾检测系统基于图像处理技术,旨在实现实时监控图像中的火灾识别与预警。该系统由图像采集、预处理、特征提取、火灾检测、结果展示及警报触发等模块组成。通过对图像进行预处理、中值滤波、颜色空间转换、阈值化、形态学处理和连通域分析,系统能够准确识别火灾疑似区域并进行标记。系统的最终目标是实现自动化火灾检测,为火灾预警系统提供辅助支持。
系统的核心模块包括:
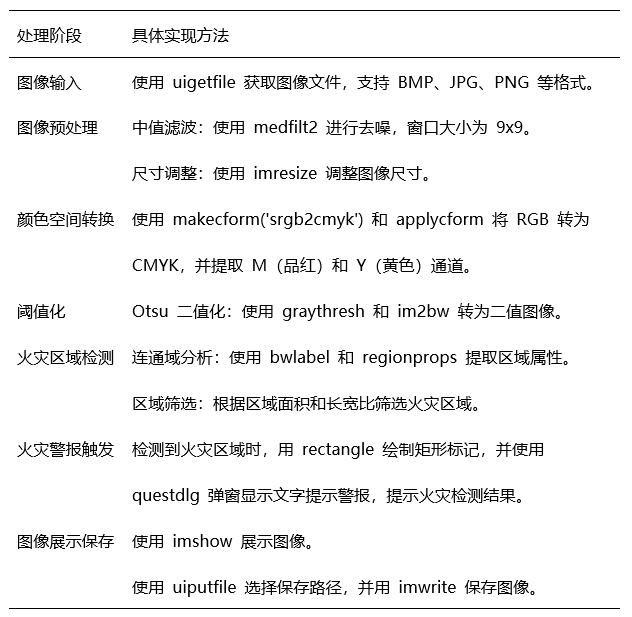
图像输入:支持读取监控摄像头的实时图像或静态图像文件。
图像预处理:进行去噪(中值滤波)、尺寸调整等处理。
颜色空间转换:将RGB图像转换为CMYK,并提取M(品红)和Y(黄色)通道。
阈值化与形态学处理:通过Otsu二值化分割图像,并应用形态学操作去除噪声。
火灾区域检测:使用连通域分析检测疑似火灾区域,并计算区域属性(面积、长宽比等)。
火灾警报触发:当检测到火灾区域时,触发警报并标记火灾区域。
图像展示与保存:展示火灾检测结果,并支持保存处理后的图像。
2.系统流程图
研究方法
该系统结合Matlab图像处理技术(如图像预处理、颜色空间转换、二值化和形态学操作)与模式识别算法(如连通域分析和区域筛选),高效地实现了火灾区域的检测与标注。通过直观的图形用户界面,系统能够实时展示火灾检测结果,帮助用户快速定位并响应火灾隐患,提升安全监控效率。
实验结果
实验结果表明,基于MATLAB的火灾检测系统能够在多种环境下高效、准确地检测火灾区域。该系统具有较好的实时性和稳定性,能够在实际应用中提供有效的火灾预警,特别适合用于监控视频流中的火灾检测。
1.实验过程
图1:图像读取与火灾区域检测界面

图2:预处理与火灾区域标记界面
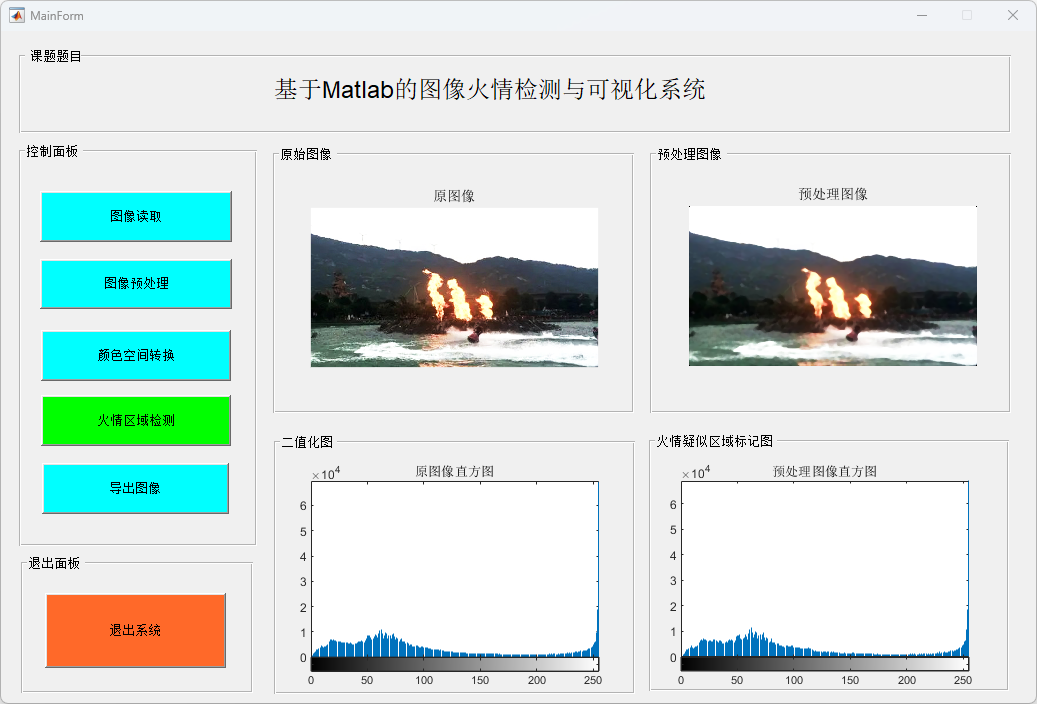
图3:图像二值化与火灾疑似区域标记

图4:检测结果提示与火灾区域标记

2.结果分析
该火灾检测系统在实验中的表现出色,能够准确、实时地识别火灾区域并提供及时反馈。每个处理步骤(如图像预处理、二值化、火灾区域检测和标记)都发挥了关键作用,使得整个系统能够有效地处理火灾检测任务。在实际应用中,这种系统可以用于监控视频流的火灾检测,为火灾预警和应急响应提供有效支持。
系统实现
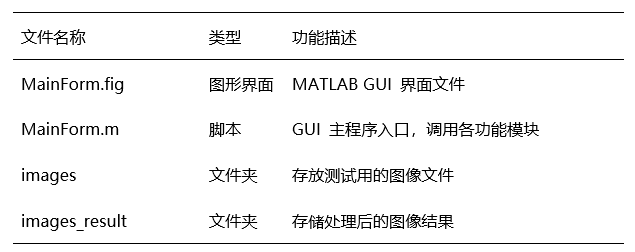
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块:
研究结论
基于MATLAB的火灾检测与可视化系统提供了一个高效、可靠且实时的解决方案,可以广泛应用于各种火灾监控场景。系统不仅能够准确识别火灾区域,还能及时提供报警信息,为火灾的预防和应急响应提供支持。通过不断优化和升级,系统有潜力成为智能消防领域的重要工具。
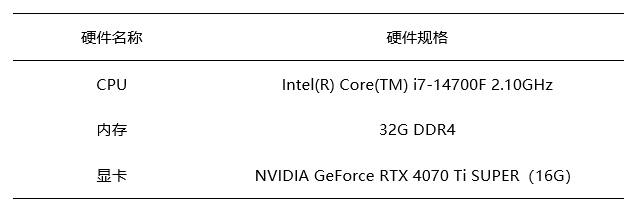
实验环境
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。
![信息学奥赛一本通 1593:【例 2】牧场的安排 | 洛谷 P1879 [USACO06NOV] Corn Fields G](http://pic.xiahunao.cn/信息学奥赛一本通 1593:【例 2】牧场的安排 | 洛谷 P1879 [USACO06NOV] Corn Fields G)



)
图片向量化存储-Milvus 单机版部署)

正则表达式)











