目录
一、特征提取核心概念:什么是图像特征?
二、实战 1:Harris 角点检测
1.1 角点的物理意义
1.2 Harris 算法原理
1.3 OpenCV 实战代码与解析
1.4 结果分析
三、实战 2:SIFT 特征提取
3.1 SIFT 算法核心优势
3.2 SIFT 算法步骤
3.3 OpenCV 实战代码与解析
3.4 关键点属性解析
四、特征提取的工程应用场景
4.1 图像拼接
4.2 目标跟踪
4.3 文物数字化
五、常见问题与解决方案
5.1 SIFT 算法运行报错:“module 'cv2' has no attribute 'xfeatures2d'”
5.2 角点检测结果中 “伪角点” 过多
5.3 SIFT 特征匹配速度慢
在计算机视觉领域,特征提取是连接图像原始像素与高层语义理解的关键桥梁。无论是图像拼接、目标跟踪,还是人脸识别、文物数字化,都依赖于高效的特征提取技术。本文将以 OpenCV 为工具,从基础概念出发,结合实战代码,系统讲解角点检测、SIFT 特征提取等核心技术,帮助读者掌握特征提取的本质与应用。
一、特征提取核心概念:什么是图像特征?
图像特征是图像中具有独特性、可区分性的 “关键信息”,能够反映图像局部或全局的本质属性。常见的图像特征可分为三类:
- 局部特征:如角点、边缘、纹理,聚焦图像局部区域的灰度变化或结构信息,适用于目标匹配、姿态估计等场景;
- 全局特征:如直方图、图像矩,描述整幅图像的统计属性,常用于图像检索、风格分类;
- 深度学习特征:通过 CNN 网络自动学习的抽象特征,如 CNN 的卷积层输出,适用于复杂场景的图像识别。
在传统计算机视觉中,局部特征因具备尺度不变性(对图像缩放不敏感)、旋转不变性(对图像旋转不敏感)和光照鲁棒性(对光照变化不敏感),成为特征提取的核心研究对象。本文重点讲解两类经典局部特征提取技术:角点检测(Harris 算法)与尺度不变特征变换(SIFT)。
二、实战 1:Harris 角点检测
1.1 角点的物理意义
角点是图像中局部区域与周围区域存在剧烈灰度变化的像素点,通俗来说,就是 “两条边缘的交点”(如矩形的四个顶点、建筑物的转角)。角点的核心特性是:当窗口沿任意方向滑动时,窗口内像素的灰度值都会发生显著变化,这也是 Harris 算法的核心判断依据。
1.2 Harris 算法原理
Harris 算法通过计算图像中每个像素的局部自相关矩阵,来量化像素的 “角点程度”。其核心步骤如下:
- 灰度化处理:将彩色图像转换为灰度图像,减少计算量(颜色信息对角度检测无关键影响);
- 计算梯度:使用 Sobel 算子计算像素在 x、y 方向的梯度(反映灰度变化率);
- 构建自相关矩阵:对梯度进行高斯加权(增强局部相关性),构建每个像素的 2×2 自相关矩阵;
- 计算角点响应值:通过自相关矩阵的特征值,计算角点响应值
R,公式为:
R = det(M) - k·trace(M)²
其中det(M)是矩阵行列式,trace(M)是矩阵迹,k为经验参数(通常取 0.04~0.06); - 阈值筛选:将响应值
R大于 “0.05×R_max”(R_max 为全局最大响应值)的像素标记为角点。
1.3 OpenCV 实战代码与解析
以下代码以 “故宫.jpg” 为例,实现 Harris 角点检测,并将检测到的角点用红色标记:
import cv2
import numpy as np# 1. 读取图像并灰度化
img = cv2.imread('gugong.jpg') # 读取彩色图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转换为灰度图像# 2. 调用Harris角点检测函数
# 参数说明:
# - gray:输入灰度图像
# - blockSize:角点检测的邻域大小(通常取3~5)
# - ksize:Sobel算子的窗口大小(必须为奇数,通常取3)
# - k:经验参数(0.04~0.06)
dst = cv2.cornerHarris(gray, blockSize=4, ksize=3, k=0.04)# 3. 阈值筛选并标记角点(红色:BGR格式为[0,0,255])
img[dst > 0.05 * dst.max()] = [0, 0, 255] # 响应值大于阈值的像素标记为红色# 4. 显示结果
cv2.imshow('Harris Corner Detection', img)
cv2.waitKey(0) # 等待按键关闭窗口
cv2.destroyAllWindows()
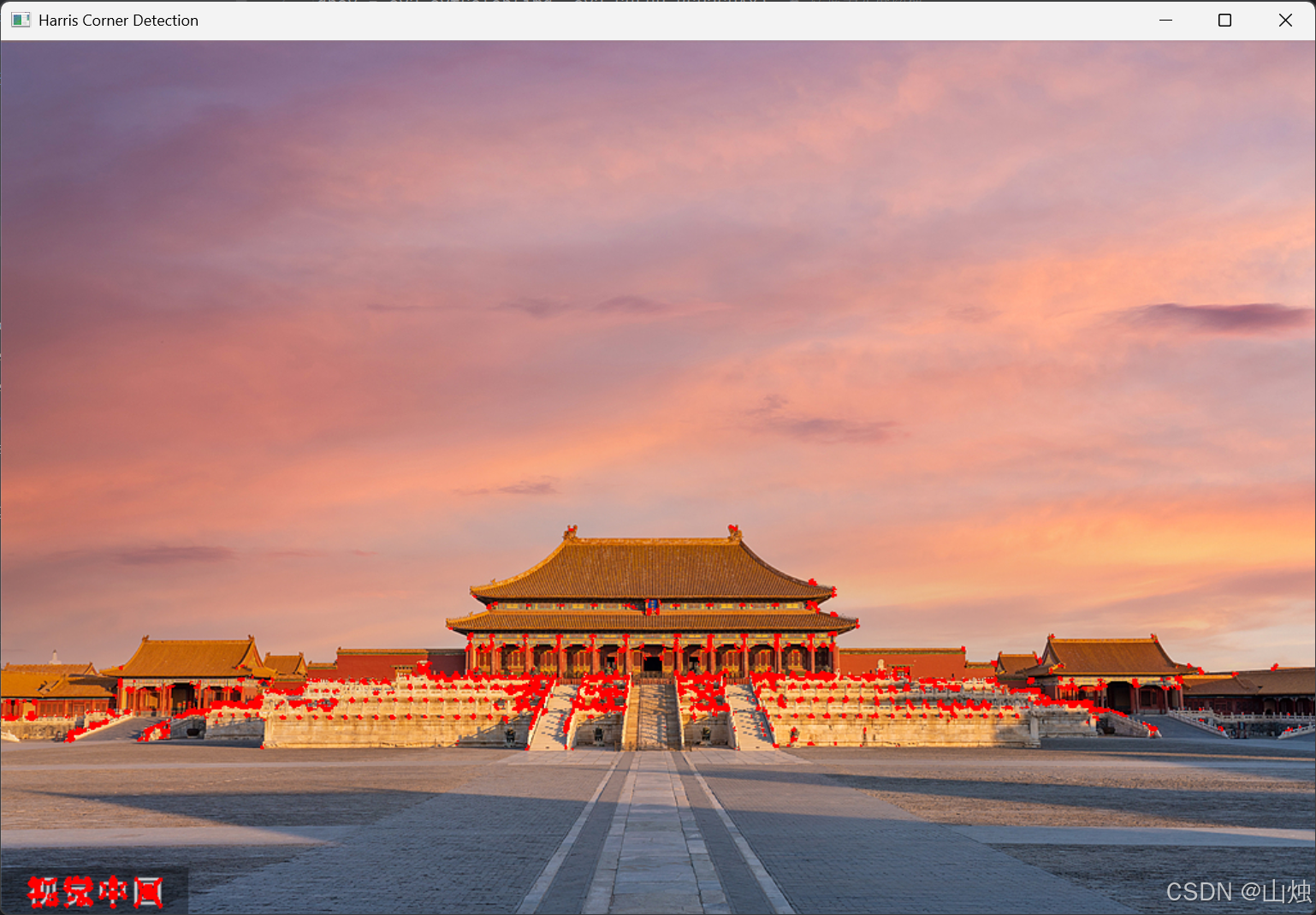
1.4 结果分析
运行代码后,图像中建筑物的转角、栏杆的交点等角点会被红色标记。需注意:
blockSize过小时,易受噪声干扰(误检率高);过大时,会遗漏小尺度角点;- 阈值 “0.05×dst.max ()” 可根据图像调整,若角点过多可增大阈值(如 0.1×dst.max ()),若角点过少可减小阈值(如 0.03×dst.max ())。
三、实战 2:SIFT 特征提取
Harris 角点检测虽能捕捉局部特征,但存在明显缺陷:不具备尺度不变性(同一物体在不同缩放比例下,Harris 检测的角点可能完全不同)。而 SIFT(Scale-Invariant Feature Transform,尺度不变特征变换)算法通过 “尺度空间” 理论,解决了这一问题,成为计算机视觉领域的经典算法。
3.1 SIFT 算法核心优势
SIFT 特征具有四大关键特性,使其适用于复杂场景:
- 尺度不变性:通过构建高斯金字塔,在不同尺度下检测特征点,同一物体无论缩放多少倍,都能检测到相同的特征;
- 旋转不变性:为每个特征点计算主方向,使特征描述符与旋转角度无关;
- 光照鲁棒性:通过归一化处理,减少光照变化对特征描述符的影响;
- 独特性强:每个特征点用 128 维向量描述,能在海量特征中准确匹配。
3.2 SIFT 算法步骤
SIFT 算法分为 “特征点检测” 和 “特征点描述” 两大阶段,共四步:
- 尺度空间构建:通过高斯模糊(不同标准差 σ)和下采样,构建高斯金字塔,再计算相邻层的差分(DOG,Difference of Gaussians),形成 DOG 金字塔;
- 特征点定位:在 DOG 金字塔中,通过三维插值(空间 + 尺度)找到极值点,剔除低对比度和边缘点,得到稳定的特征点;
- 主方向分配:以特征点为中心,统计邻域内像素的梯度方向直方图,取直方图峰值对应的方向作为主方向(若存在多个峰值,可分配辅方向);
- 特征描述符生成:将特征点邻域划分为 16 个 4×4 的子块,每个子块统计 8 个方向的梯度直方图,最终形成 16×8=128 维的特征向量(即描述符)。
3.3 OpenCV 实战代码与解析
OpenCV 3.4 及以上版本中,SIFT 算法已集成到cv2.SIFT_create()中(需安装opencv-contrib-python扩展库)。以下代码实现 SIFT 特征点检测与可视化:
import cv2
import numpy as np# 1. 读取图像并灰度化
img = cv2.imread('gugong.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 2. 创建SIFT对象并检测特征点
sift = cv2.SIFT_create() # 初始化SIFT提取器
kp = sift.detect(gray, None) # 检测特征点(kp为关键点列表)# 3. 可视化特征点(绘制“富信息关键点”:包含位置、尺度、方向)
# 参数说明:
# - img:原始图像
# - kp:检测到的关键点
# - flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS:绘制关键点的大小和方向
img_sift = cv2.drawKeypoints(image=img,keypoints=kp,outImage=None,flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS,color=(0, 255, 0) # 关键点标记为绿色
)# 4. 计算特征描述符(128维向量)
kp, des = sift.compute(img, kp) # des为描述符矩阵,形状为(关键点数量, 128)# 5. 输出特征信息并显示结果
print(f"关键点数量:{np.array(kp).shape[0]}")
print(f"描述符形状:{des.shape}") # 例如:(1200, 128)表示1200个特征点,每个用128维向量描述cv2.imshow('SIFT Feature Detection', img_sift)
cv2.waitKey(0)
cv2.destroyAllWindows()
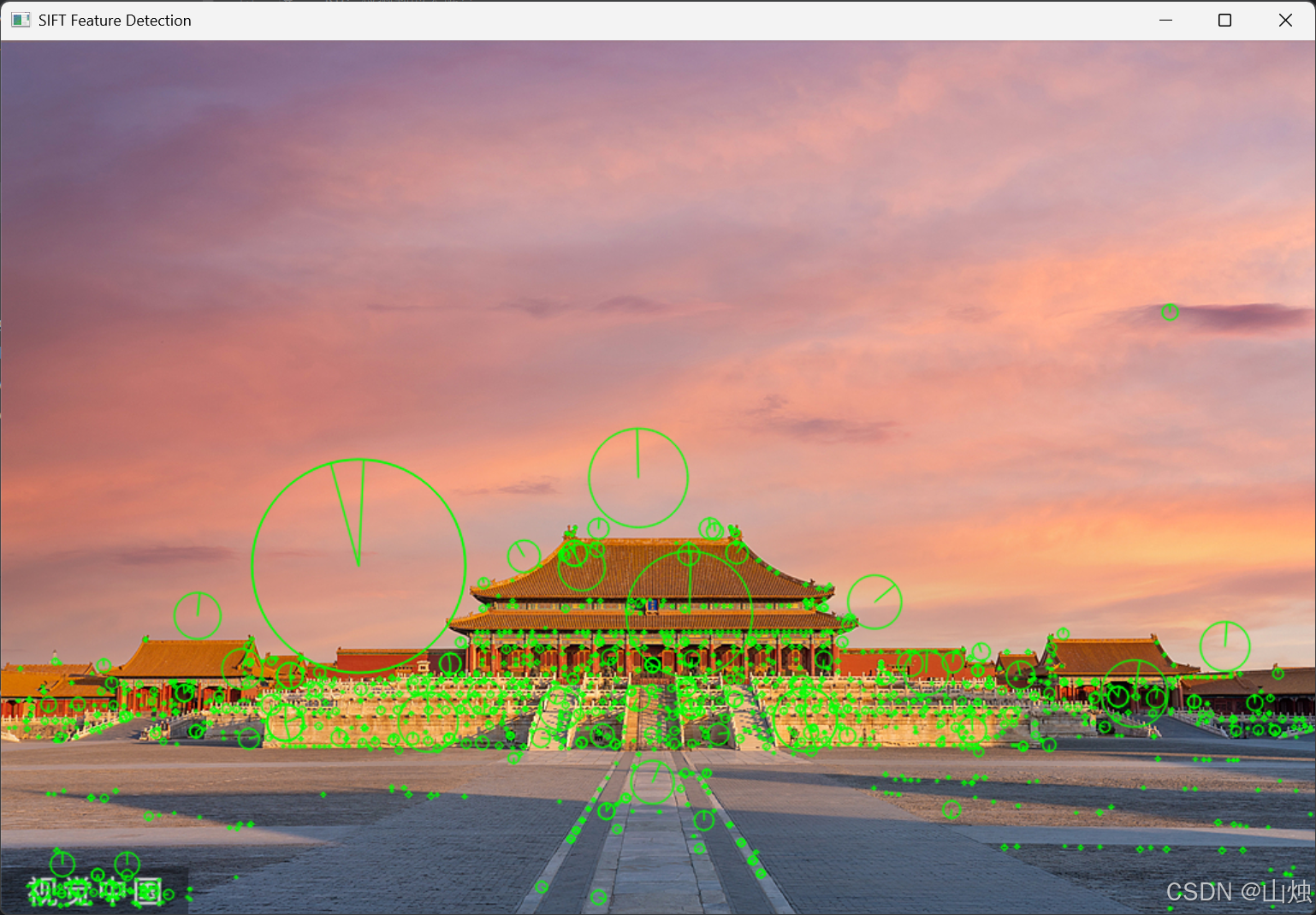
关键点数量:1508
描述符形状:(1508, 128)3.4 关键点属性解析
kp(关键点列表)中的每个元素包含多个核心属性,可用于后续特征匹配或分析:
kp.pt:关键点的坐标(x, y),如 (123.4, 45.6);kp.size:关键点的尺度(对应高斯金字塔的层,尺度越大,关键点覆盖范围越广);kp.angle:关键点的主方向(0~360 度,顺时针为正);kp.response:关键点的响应值(值越大,关键点越稳定);kp.octave:关键点所在的高斯金字塔层级(用于尺度恢复)。
四、特征提取的工程应用场景
特征提取技术并非孤立存在,而是支撑众多计算机视觉应用的核心模块。以下是三个典型应用场景:
4.1 图像拼接
通过 SIFT 特征匹配,找到两张重叠图像的对应特征点,再通过单应性矩阵计算图像的透视变换,最终将多张图像拼接为全景图。例如:
- 对两张重叠的 “故宫” 图像分别提取 SIFT 特征;
- 使用 FLANN 匹配器(快速最近邻搜索)匹配两张图像的特征点;
- 剔除错误匹配(如通过 “比值法”:d1/d2 < 0.7,d1、d2 为最近邻和次近邻的距离);
- 基于正确匹配的特征点,求解透视变换矩阵;
- 调用
cv2.warpPerspective()实现图像拼接。
4.2 目标跟踪
在视频跟踪中,通过 SIFT 或 ORB(高效版 SIFT)提取初始帧的目标特征,后续帧中匹配相同特征,实现目标的实时跟踪。相比单纯的颜色跟踪,特征跟踪对目标旋转、遮挡的鲁棒性更强。
4.3 文物数字化
在文物保护中,通过 Harris 角点检测捕捉文物的轮廓拐点(如青铜器的纹饰转角),结合 SIFT 特征构建文物的 “特征图谱”,可用于文物的碎片拼接、真伪鉴别(仿品的特征分布与真品存在差异)。
五、常见问题与解决方案
5.1 SIFT 算法运行报错:“module 'cv2' has no attribute 'xfeatures2d'”
原因:OpenCV 官方版本中,SIFT 等专利算法已移至opencv-contrib-python扩展库,需单独安装。
解决方案:
卸载原 OpenCV,安装指定版本的扩展库(避免版本兼容性问题):
pip uninstall opencv-python
pip install opencv-python==3.4.18.65
pip install opencv-contrib-python==3.4.18.65
5.2 角点检测结果中 “伪角点” 过多
原因:图像噪声干扰、blockSize过小或阈值过低。
解决方案:
- 先对图像进行高斯模糊(
cv2.GaussianBlur(gray, (3,3), 0)),减少噪声; - 增大
blockSize(如从 3 调整为 5); - 提高阈值(如从 0.05×dst.max () 调整为 0.1×dst.max ())。
5.3 SIFT 特征匹配速度慢
原因:SIFT 描述符为 128 维,暴力匹配(cv2.BFMatcher())的时间复杂度高。
解决方案:使用 FLANN 匹配器(cv2.FlannBasedMatcher()),通过索引加速匹配,适用于海量特征点场景:
# FLANN匹配器示例
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50) # checks越大,匹配越准确,但速度越慢
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2) # des1、des2为两张图像的描述符

详解(环境搭建+项目开发示例))


基础概念)


)
:基于IMX6ULL的点灯操作》)






![洛谷P9468 [EGOI 2023] Candy / 糖果题解](http://pic.xiahunao.cn/洛谷P9468 [EGOI 2023] Candy / 糖果题解)
大模型入门【3】--基于Chailit客服端实现页面AI对话)


